 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASAP-MO:Advanced Situational Awareness and Perception for Mission-critical Operations
May 02, 2025Deploying robotic missions can be challenging due to the complexity of controlling robots with multiple degrees of freedom, fusing diverse sensory inputs, and managing communication delays and interferences. In nuclear inspection, robots can be crucial in assessing environments where human presence is limited, requiring precise teleoperation and coordination. Teleoperation requires extensive training, as operators must process multiple outputs while ensuring safe interaction with critical assets. These challenges are amplified when operating a fleet of heterogeneous robots across multiple environments, as each robot may have distinct control interfaces, sensory systems, and operational constraints. Efficient coordination in such settings remains an open problem. This paper presents a field report on how we integrated robot fleet capabilities - including mapping, localization, and telecommunication - toward a joint mission. We simulated a nuclear inspection scenario for exposed areas, using lights to represent a radiation source. We deployed two Unmanned Ground Vehicles (UGVs) tasked with mapping indoor and outdoor environments while remotely controlled from a single base station. Despite having distinct operational goals, the robots produced a unified map output, demonstrating the feasibility of coordinated multi-robot missions. Our results highlight key operational challenges and provide insights into improving adaptability and situational awareness in remote robotic deployments.
Under Pressure: Altimeter-Aided ICP for 3D Maps Consistency
Oct 01, 2024We propose a novel method to enhance the accuracy of the Iterative Closest Point (ICP) algorithm by integrating altitude constraints from a barometric pressure sensor. While ICP is widely used in mobile robotics for Simultaneous Localization and Mapping ( SLAM ), it is susceptible to drift, especially in underconstrained environments such as vertical shafts. To address this issue, we propose to augment ICP with altimeter measurements, reliably constraining drifts along the gravity vector. To demonstrate the potential of altimetry in SLAM , we offer an analysis of calibration procedures and noise sensitivity of various pressure sensors, improving measurements to centimeter-level accuracy. Leveraging this accuracy, we propose a novel ICP formulation that integrates altitude measurements along the gravity vector, thus simplifying the optimization problem to 3-Degree Of Freedom (DOF). Experimental results from real-world deployments demonstrate that our method reduces vertical drift by 84% and improves overall localization accuracy compared to state-of-the-art methods in non-planar environments.
UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation
Sep 26, 2024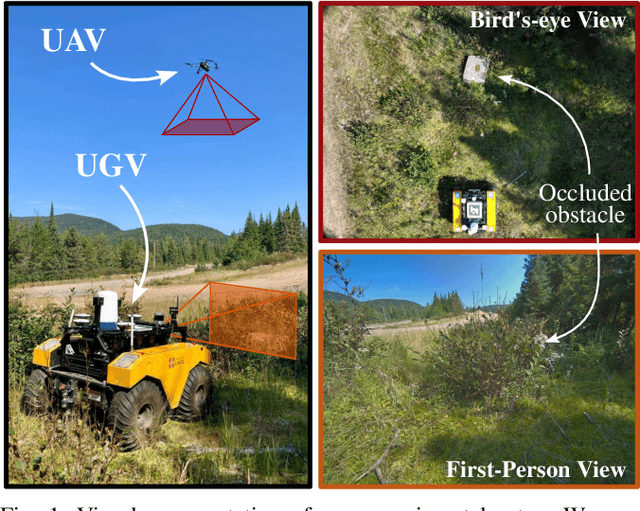
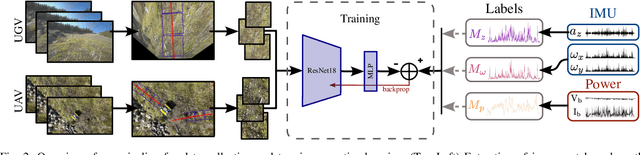
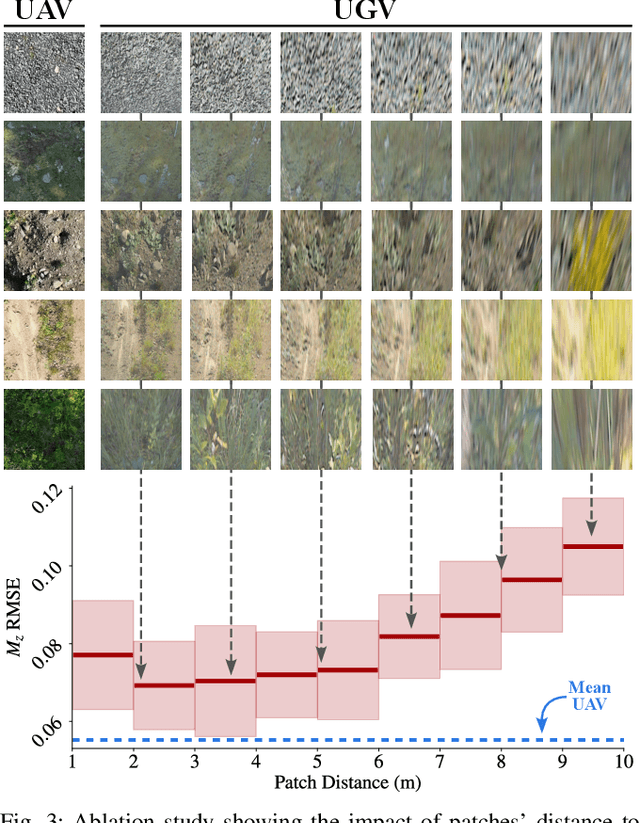
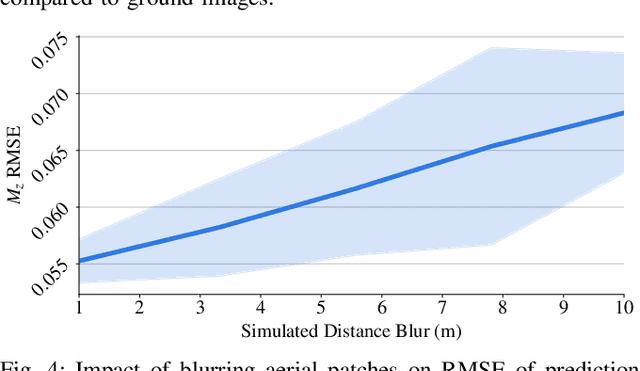
Terrain awareness is an essential milestone to enable truly autonomous off-road navigation. Accurately predicting terrain characteristics allows optimizing a vehicle's path against potential hazards. Recent methods use deep neural networks to predict traversability-related terrain properties in a self-supervised manner, relying on proprioception as a training signal. However, onboard cameras are inherently limited by their point-of-view relative to the ground, suffering from occlusions and vanishing pixel density with distance. This paper introduces a novel approach for self-supervised terrain characterization using an aerial perspective from a hovering drone. We capture terrain-aligned images while sampling the environment with a ground vehicle, effectively training a simple predictor for vibrations, bumpiness, and energy consumption. Our dataset includes 2.8 km of off-road data collected in forest environment, comprising 13 484 ground-based images and 12 935 aerial images. Our findings show that drone imagery improves terrain property prediction by 21.37 % on the whole dataset and 37.35 % in high vegetation, compared to ground robot images. We conduct ablation studies to identify the main causes of these performance improvements. We also demonstrate the real-world applicability of our approach by scouting an unseen area with a drone, planning and executing an optimized path on the ground.
FoMo: A Proposal for a Multi-Season Dataset for Robot Navigation in Forêt Montmorency
Apr 19, 2024In this paper, we propose the FoMo (For\^et Montmorency) dataset: a comprehensive, multi-season data collection. Located in the Montmorency Forest, Quebec, Canada, our dataset will capture a rich variety of sensory data over six distinct trajectories totaling 6 kilometers, repeated through different seasons to accumulate 42 kilometers of recorded data. The boreal forest environment increases the diversity of datasets for mobile robot navigation. This proposed dataset will feature a broad array of sensor modalities, including lidar, radar, and a navigation-grade Inertial Measurement Unit (IMU), against the backdrop of challenging boreal forest conditions. Notably, the FoMo dataset will be distinguished by its inclusion of seasonal variations, such as changes in tree canopy and snow depth up to 2 meters, presenting new challenges for robot navigation algorithms. Alongside, we will offer a centimeter-level accurate ground truth, obtained through Post Processed Kinematic (PPK) Global Navigation Satellite System (GNSS) correction, facilitating precise evaluation of odometry and localization algorithms. This work aims to spur advancements in autonomous navigation, enabling the development of robust algorithms capable of handling the dynamic, unstructured environments characteristic of boreal forests. With a public odometry and localization leaderboard and a dedicated software suite, we invite the robotics community to engage with the FoMo dataset by exploring new frontiers in robot navigation under extreme environmental variations. We seek feedback from the community based on this proposal to make the dataset as useful as possible. For further details and supplementary materials, please visit https://norlab-ulaval.github.io/FoMo-website/.
RTS-GT: Robotic Total Stations Ground Truthing dataset
Sep 21, 2023



Numerous datasets and benchmarks exist to assess and compare Simultaneous Localization and Mapping (SLAM) algorithms. Nevertheless, their precision must follow the rate at which SLAM algorithms improved in recent years. Moreover, current datasets fall short of comprehensive data-collection protocol for reproducibility and the evaluation of the precision or accuracy of the recorded trajectories. With this objective in mind, we proposed the Robotic Total Stations Ground Truthing dataset (RTS-GT) dataset to support localization research with the generation of six-Degrees Of Freedom (DOF) ground truth trajectories. This novel dataset includes six-DOF ground truth trajectories generated using a system of three Robotic Total Stations (RTSs) tracking moving robotic platforms. Furthermore, we compare the performance of the RTS-based system to a Global Navigation Satellite System (GNSS)-based setup. The dataset comprises around sixty experiments conducted in various conditions over a period of 17 months, and encompasses over 49 kilometers of trajectories, making it the most extensive dataset of RTS-based measurements to date. Additionally, we provide the precision of all poses for each experiment, a feature not found in the current state-of-the-art datasets. Our results demonstrate that RTSs provide measurements that are 22 times more stable than GNSS in various environmental settings, making them a valuable resource for SLAM benchmark development.
Benchmarking ground truth trajectories with robotic total stations
Sep 10, 2023Benchmarks stand as vital cornerstones in elevating SLAM algorithms within mobile robotics. Consequently, ensuring accurate and reproducible ground truth generation is vital for fair evaluation. A majority of outdoor ground truths are generated by GNSS, which can lead to discrepancies over time, especially in covered areas. However, research showed that RTS setups are more precise and can alternatively be used to generate these ground truths. In our work, we compare both RTS and GNSS systems' precision and repeatability through a set of experiments conducted weeks and months apart in the same area. We demonstrated that RTS setups give more reproducible results, with disparities having a median value of 8.6 mm compared to a median value of 10.6 cm coming from a GNSS setup. These results highlight that RTS can be considered to benchmark process for SLAM algorithms with higher precision.
Uncertainty analysis for accurate ground truth trajectories with robotic total stations
Aug 03, 2023In the context of robotics, accurate ground truth positioning is essential for the development of Simultaneous Localization and Mapping (SLAM) and control algorithms. Robotic Total Stations (RTSs) provide accurate and precise reference positions in different types of outdoor environments, especially when compared to the limited accuracy of Global Navigation Satellite System (GNSS) in cluttered areas. Three RTSs give the possibility to obtain the six-Degrees Of Freedom (DOF) reference pose of a robotic platform. However, the uncertainty of every pose is rarely computed for trajectory evaluation. As evaluation algorithms are getting increasingly precise, it becomes crucial to take into account this uncertainty. We propose a method to compute this six-DOF uncertainty from the fusion of three RTSs based on Monte Carlo (MC) methods. This solution relies on point-to-point minimization to propagate the noise of RTSs on the pose of the robotic platform. Five main noise sources are identified to model this uncertainty: noise inherent to the instrument, tilt noise, atmospheric factors, time synchronization noise, and extrinsic calibration noise. Based on extensive experimental work, we compare the impact of each noise source on the prism uncertainty and the final estimated pose. Tested on more than 50 km of trajectories, our comparison highlighted the importance of the calibration noise and the measurement distance, which should be ideally under 75 m. Moreover, it has been noted that the uncertainty on the pose of the robot is not prominently affected by one particular noise source, compared to the others.