 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadar Odometry Subject to High Tilt Dynamics of Subarctic Environments
Apr 21, 2026Rotating FMCW radar odometry methods often assume flat ground conditions. While this assumption is sufficient in many scenarios, including urban environments or flat mining setups, the highly dynamic terrain of subarctic environments poses a challenge to standard feature extraction and state estimation techniques. This paper benchmarks three existing radar odometry methods under demanding conditions, exhibiting up to 13° in pitch and 4° in roll difference between consecutive scans, with absolute pitch and roll reaching 30° and 8°, respectively. Furthermore, we propose a novel radar-inertial odometry method utilizing tilt-proximity submap search and a hard threshold for vertical displacement between scan points and the estimated axis of rotation. Experimental results demonstrate a state-of-the-art performance of our method on an urban baseline and a 0.3% improvement over the second-best comparative method on a 2-kilometer-long dynamic trajectory. Finally, we analyze the performance of the four evaluated methods on a complex radar sequence characterized by high lateral slip and a steep ditch traversal.
FoMo: A Multi-Season Dataset for Robot Navigation in Forêt Montmorency
Mar 09, 2026The Forêt Montmorency (FoMo) dataset is a comprehensive multi-season data collection, recorded over the span of one year in a boreal forest. Featuring a unique combination of on- and off-pavement environments with significant environmental changes, the dataset challenges established odometry and SLAM pipelines. Some highlights of the data include the accumulation of snow exceeding 1 m, significant vegetation growth in front of sensors, and operations at the traction limits of the platform. In total, the FoMo dataset includes over 64 km of six diverse trajectories, repeated during 12 deployments throughout the year. The dataset features data from one rotating and one hybrid solid-state lidar, a Frequency Modulated Continuous Wave (FMCW) radar, full-HD images from a stereo camera and a wide lens monocular camera, as well as data from two IMUs. Ground Truth is calculated by post-processing three GNSS receivers mounted on the Uncrewed Ground Vehicle (UGV) and a static GNSS base station. Additional metadata, such as one measurement per minute from an on-site weather station, camera calibration intrinsics, and vehicle power consumption, is available for all sequences. To highlight the relevance of the dataset, we performed a preliminary evaluation of the robustness of a lidar-inertial, radar-gyro, and a visual-inertial localization and mapping techniques to seasonal changes. We show that seasonal changes have serious effects on the re-localization capabilities of the state-of-the-art methods. The dataset and development kit are available at https://fomo.norlab.ulaval.ca.
Toward Teach and Repeat Across Seasonal Deep Snow Accumulation
May 02, 2025Teach and repeat is a rapid way to achieve autonomy in challenging terrain and off-road environments. A human operator pilots the vehicles to create a network of paths that are mapped and associated with odometry. Immediately after teaching, the system can drive autonomously within its tracks. This precision lets operators remain confident that the robot will follow a traversable route. However, this operational paradigm has rarely been explored in off-road environments that change significantly through seasonal variation. This paper presents preliminary field trials using lidar and radar implementations of teach and repeat. Using a subset of the data from the upcoming FoMo dataset, we attempted to repeat routes that were 4 days, 44 days, and 113 days old. Lidar teach and repeat demonstrated a stronger ability to localize when the ground points were removed. FMCW radar was often able to localize on older maps, but only with small deviations from the taught path. Additionally, we highlight specific cases where radar localization failed with recent maps due to the high pitch or roll of the vehicle. We highlight lessons learned during the field deployment and highlight areas to improve to achieve reliable teach and repeat with seasonal changes in the environment. Please follow the dataset at https://norlab-ulaval.github.io/FoMo-website for updates and information on the data release.
Field Report on a Wearable and Versatile Solution for Field Acquisition and Exploration
Apr 30, 2024
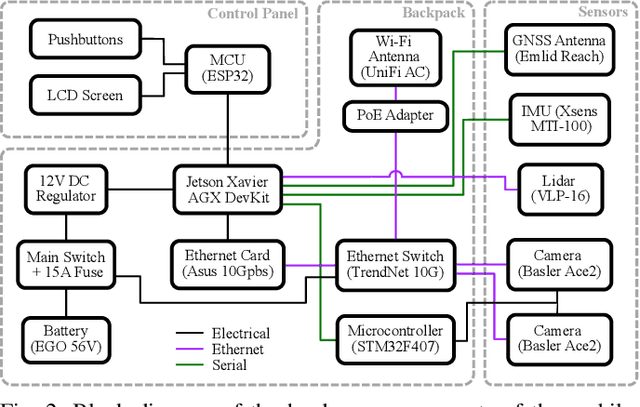
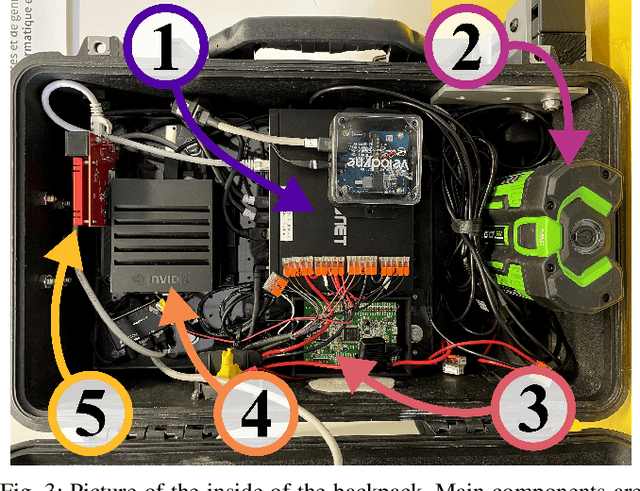

This report presents a wearable plug-and-play platform for data acquisition in the field. The platform, extending a waterproof Pelican Case into a 20 kg backpack offers 5.5 hours of power autonomy, while recording data with two cameras, a lidar, an Inertial Measurement Unit (IMU), and a Global Navigation Satellite System (GNSS) receiver. The system only requires a single operator and is readily controlled with a built-in screen and buttons. Due to its small footprint, it offers greater flexibility than large vehicles typically deployed in off-trail environments. We describe the platform's design, detailing the mechanical parts, electrical components, and software stack. We explain the system's limitations, drawing from its extensive deployment spanning over 20 kilometers of trajectories across various seasons, environments, and weather conditions. We derive valuable lessons learned from these deployments and present several possible applications for the system. The possible use cases consider not only academic research but also insights from consultations with our industrial partners. The mechanical design including all CAD files, as well as the software stack, are publicly available at https://github.com/norlab-ulaval/backpack_workspace.
3D Mapping of Glacier Moulins: Challenges and lessons learned
Apr 29, 2024


In this paper, we present a field report of the mapping of the Athabasca Glacier, using a custom-made lidar-inertial mapping platform. With the increasing autonomy of robotics, a wider spectrum of applications emerges. Among these, the surveying of environmental areas presents arduous and hazardous challenges for human operators. Leveraging automated platforms for data collection holds the promise of unlocking new applications and a deeper comprehension of the environment. Over the course of a week-long deployment, we collected glacier data using a tailor-made measurement platform and reflected on the inherent challenges associated with such experiments. We focus on the insights gained and the forthcoming challenges that robotics must surmount to effectively map these terrains.
FoMo: A Proposal for a Multi-Season Dataset for Robot Navigation in Forêt Montmorency
Apr 19, 2024In this paper, we propose the FoMo (For\^et Montmorency) dataset: a comprehensive, multi-season data collection. Located in the Montmorency Forest, Quebec, Canada, our dataset will capture a rich variety of sensory data over six distinct trajectories totaling 6 kilometers, repeated through different seasons to accumulate 42 kilometers of recorded data. The boreal forest environment increases the diversity of datasets for mobile robot navigation. This proposed dataset will feature a broad array of sensor modalities, including lidar, radar, and a navigation-grade Inertial Measurement Unit (IMU), against the backdrop of challenging boreal forest conditions. Notably, the FoMo dataset will be distinguished by its inclusion of seasonal variations, such as changes in tree canopy and snow depth up to 2 meters, presenting new challenges for robot navigation algorithms. Alongside, we will offer a centimeter-level accurate ground truth, obtained through Post Processed Kinematic (PPK) Global Navigation Satellite System (GNSS) correction, facilitating precise evaluation of odometry and localization algorithms. This work aims to spur advancements in autonomous navigation, enabling the development of robust algorithms capable of handling the dynamic, unstructured environments characteristic of boreal forests. With a public odometry and localization leaderboard and a dedicated software suite, we invite the robotics community to engage with the FoMo dataset by exploring new frontiers in robot navigation under extreme environmental variations. We seek feedback from the community based on this proposal to make the dataset as useful as possible. For further details and supplementary materials, please visit https://norlab-ulaval.github.io/FoMo-website/.
Saturation-Aware Angular Velocity Estimation: Extending the Robustness of SLAM to Aggressive Motions
Oct 11, 2023



We propose a novel angular velocity estimation method to increase the robustness of Simultaneous Localization And Mapping (SLAM) algorithms against gyroscope saturations induced by aggressive motions. Field robotics expose robots to various hazards, including steep terrains, landslides, and staircases, where substantial accelerations and angular velocities can occur if the robot loses stability and tumbles. These extreme motions can saturate sensor measurements, especially gyroscopes, which are the first sensors to become inoperative. While the structural integrity of the robot is at risk, the resilience of the SLAM framework is oftentimes given little consideration. Consequently, even if the robot is physically capable of continuing the mission, its operation will be compromised due to a corrupted representation of the world. Regarding this problem, we propose a way to estimate the angular velocity using accelerometers during extreme rotations caused by tumbling. We show that our method reduces the median localization error by 71.5 % in translation and 65.5 % in rotation and reduces the number of SLAM failures by 73.3 % on the collected data. We also propose the Tumbling-Induced Gyroscope Saturation (TIGS) dataset, which consists of outdoor experiments recording the motion of a lidar subject to angular velocities four times higher than other available datasets. The dataset is available online at https://github.com/norlab-ulaval/Norlab_wiki/wiki/TIGS-Dataset.
Exposing the Unseen: Exposure Time Emulation for Offline Benchmarking of Vision Algorithms
Sep 22, 2023Visual Odometry (VO) is one of the fundamental tasks in computer vision for robotics. However, its performance is deeply affected by High Dynamic Range (HDR) scenes, omnipresent outdoor. While new Automatic-Exposure (AE) approaches to mitigate this have appeared, their comparison in a reproducible manner is problematic. This stems from the fact that the behavior of AE depends on the environment, and it affects the image acquisition process. Consequently, AE has traditionally only been benchmarked in an online manner, making the experiments non-reproducible. To solve this, we propose a new methodology based on an emulator that can generate images at any exposure time. It leverages BorealHDR, a unique multi-exposure stereo dataset collected over 8.4 km, on 50 trajectories with challenging illumination conditions. Moreover, it contains pose ground truth for each image and a global 3D map, based on lidar data. We show that using these images acquired at different exposure times, we can emulate realistic images keeping a Root-Mean-Square Error (RMSE) below 1.78 % compared to ground truth images. To demonstrate the practicality of our approach for offline benchmarking, we compared three state-of-the-art AE algorithms on key elements of Visual Simultaneous Localization And Mapping (VSLAM) pipeline, against four baselines. Consequently, reproducible evaluation of AE is now possible, speeding up the development of future approaches. Our code and dataset are available online at this link: https://github.com/norlab-ulaval/BorealHDR