 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Predictive Control Strategy to Offset-Point Tracking for Agricultural Mobile Robots
Mar 30, 2026Robots are increasingly being deployed in agriculture to support sustainable practices and improve productivity. They offer strong potential to enable precise, efficient, and environmentally friendly operations. However, most existing path-following controllers focus solely on the robot's center of motion and neglect the spatial footprint and dynamics of attached implements. In practice, implements such as mechanical weeders or spring-tine cultivators are often large, rigidly mounted, and directly interacting with crops and soil; ignoring their position can degrade tracking performance and increase the risk of crop damage. To address this limitation, we propose a closed-form predictive control strategy extending the approach introduced in [1]. The method is developed specifically for Ackermann-type agricultural vehicles and explicitly models the implement as a rigid offset point, while accounting for lateral slip and lever-arm effects. The approach is benchmarked against state-of-the-art baseline controllers, including a reactive geometric method, a reactive backstepping method, and a model-based predictive scheme. Real-world agricultural experiments with two different implements show that the proposed method reduces the median tracking error by 24% to 56%, and decreases peak errors during curvature transitions by up to 70%. These improvements translate into enhanced operational safety, particularly in scenarios where the implement operates in close proximity to crop rows.
Energy Prediction on Sloping Ground for Quadruped Robots
Mar 12, 2026Energy management is a fundamental challenge for legged robots in outdoor environments. Endurance directly constrains mission success, while efficient resource use reduces ecological impact. This paper investigates how terrain slope and heading orientation influence the energetic cost of quadruped locomotion. We introduce a simple energy model that relies solely on standard onboard sensors, avoids specialized instrumentation, and remains applicable in previously unexplored environments. The model is identified from field runs on a commercial quadruped and expressed as a compact function of slope angle and heading. Field validation on natural terrain shows near-linear trends of force-equivalent cost with slope angle, consistently higher lateral costs, and additive behavior across trajectory segments, supporting path-level energy prediction for planning-oriented evaluation.
When and Where Localization Fails: An Analysis of the Iterative Closest Point in Evolving Environment
Jul 23, 2025Robust relocalization in dynamic outdoor environments remains a key challenge for autonomous systems relying on 3D lidar. While long-term localization has been widely studied, short-term environmental changes, occurring over days or weeks, remain underexplored despite their practical significance. To address this gap, we present a highresolution, short-term multi-temporal dataset collected weekly from February to April 2025 across natural and semi-urban settings. Each session includes high-density point cloud maps, 360 deg panoramic images, and trajectory data. Projected lidar scans, derived from the point cloud maps and modeled with sensor-accurate occlusions, are used to evaluate alignment accuracy against the ground truth using two Iterative Closest Point (ICP) variants: Point-to-Point and Point-to-Plane. Results show that Point-to-Plane offers significantly more stable and accurate registration, particularly in areas with sparse features or dense vegetation. This study provides a structured dataset for evaluating short-term localization robustness, a reproducible framework for analyzing scan-to-map alignment under noise, and a comparative evaluation of ICP performance in evolving outdoor environments. Our analysis underscores how local geometry and environmental variability affect localization success, offering insights for designing more resilient robotic systems.
Toward a Better Understanding of Robot Energy Consumption in Agroecological Applications
Oct 10, 2024



In this paper, we present a comprehensive analysis and discussion of energy consumption in agricultural robots. Robots are emerging as a promising solution to address food production and agroecological challenges, offering potential reductions in chemical use and the ability to perform strenuous tasks beyond human capabilities. The automation of agricultural tasks introduces a previously unattainable level of complexity, enabling robots to optimize trajectories, control laws, and overall task planning. Consequently, automation can lead to higher levels of energy optimization in agricultural tasks. However, the energy consumption of robotic platforms is not fully understood, and a deeper analysis of contributing factors is essential to optimize energy use. We analyze the energy data of an automated agricultural tractor performing tasks throughout the year, revealing nontrivial correlations between the robot's velocity, the type of task performed, and energy consumption. This suggests a tradeoff between task efficiency, time to completion, and energy expenditure that can be harnessed to improve the energy efficiency of robotic agricultural operations.
Collision-Aware Traversability Analysis for Autonomous Vehicles in the Context of Agricultural Robotics
Oct 04, 2024



In this paper, we introduce a novel method for safe navigation in agricultural robotics. As global environmental challenges intensify, robotics offers a powerful solution to reduce chemical usage while meeting the increasing demands for food production. However, significant challenges remain in ensuring the autonomy and resilience of robots operating in unstructured agricultural environments. Obstacles such as crops and tall grass, which are deformable, must be identified as safely traversable, compared to rigid obstacles. To address this, we propose a new traversability analysis method based on a 3D spectral map reconstructed using a LIDAR and a multispectral camera. This approach enables the robot to distinguish between safe and unsafe collisions with deformable obstacles. We perform a comprehensive evaluation of multispectral metrics for vegetation detection and incorporate these metrics into an augmented environmental map. Utilizing this map, we compute a physics-based traversability metric that accounts for the robot's weight and size, ensuring safe navigation over deformable obstacles.
Under Pressure: Altimeter-Aided ICP for 3D Maps Consistency
Oct 01, 2024We propose a novel method to enhance the accuracy of the Iterative Closest Point (ICP) algorithm by integrating altitude constraints from a barometric pressure sensor. While ICP is widely used in mobile robotics for Simultaneous Localization and Mapping ( SLAM ), it is susceptible to drift, especially in underconstrained environments such as vertical shafts. To address this issue, we propose to augment ICP with altimeter measurements, reliably constraining drifts along the gravity vector. To demonstrate the potential of altimetry in SLAM , we offer an analysis of calibration procedures and noise sensitivity of various pressure sensors, improving measurements to centimeter-level accuracy. Leveraging this accuracy, we propose a novel ICP formulation that integrates altitude measurements along the gravity vector, thus simplifying the optimization problem to 3-Degree Of Freedom (DOF). Experimental results from real-world deployments demonstrate that our method reduces vertical drift by 84% and improves overall localization accuracy compared to state-of-the-art methods in non-planar environments.
3D Mapping of Glacier Moulins: Challenges and lessons learned
Apr 29, 2024


In this paper, we present a field report of the mapping of the Athabasca Glacier, using a custom-made lidar-inertial mapping platform. With the increasing autonomy of robotics, a wider spectrum of applications emerges. Among these, the surveying of environmental areas presents arduous and hazardous challenges for human operators. Leveraging automated platforms for data collection holds the promise of unlocking new applications and a deeper comprehension of the environment. Over the course of a week-long deployment, we collected glacier data using a tailor-made measurement platform and reflected on the inherent challenges associated with such experiments. We focus on the insights gained and the forthcoming challenges that robotics must surmount to effectively map these terrains.
Prepared for the Worst: A Learning-Based Adversarial Attack for Resilience Analysis of the ICP Algorithm
Mar 08, 2024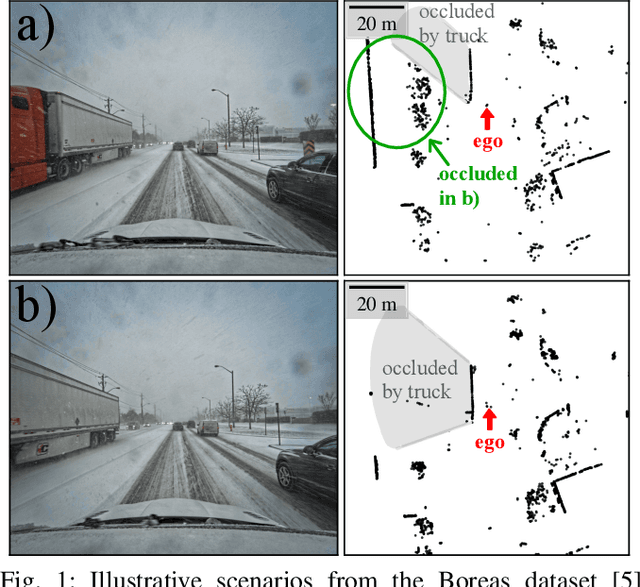
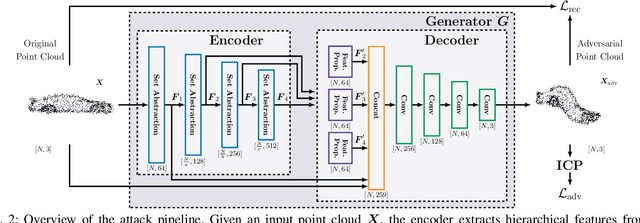
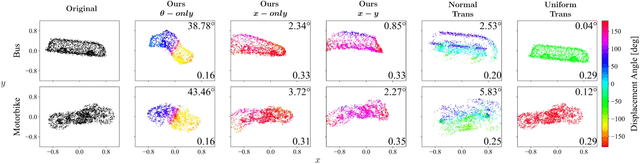
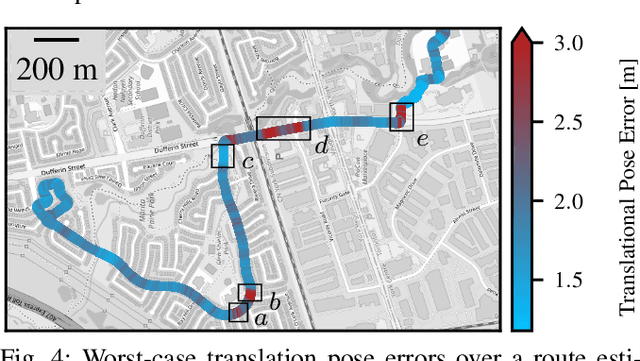
This paper presents a novel method to assess the resilience of the Iterative Closest Point (ICP) algorithm via deep-learning-based attacks on lidar point clouds. For safety-critical applications such as autonomous navigation, ensuring the resilience of algorithms prior to deployments is of utmost importance. The ICP algorithm has become the standard for lidar-based localization. However, the pose estimate it produces can be greatly affected by corruption in the measurements. Corruption can arise from a variety of scenarios such as occlusions, adverse weather, or mechanical issues in the sensor. Unfortunately, the complex and iterative nature of ICP makes assessing its resilience to corruption challenging. While there have been efforts to create challenging datasets and develop simulations to evaluate the resilience of ICP empirically, our method focuses on finding the maximum possible ICP pose error using perturbation-based adversarial attacks. The proposed attack induces significant pose errors on ICP and outperforms baselines more than 88% of the time across a wide range of scenarios. As an example application, we demonstrate that our attack can be used to identify areas on a map where ICP is particularly vulnerable to corruption in the measurements.
Saturation-Aware Angular Velocity Estimation: Extending the Robustness of SLAM to Aggressive Motions
Oct 11, 2023



We propose a novel angular velocity estimation method to increase the robustness of Simultaneous Localization And Mapping (SLAM) algorithms against gyroscope saturations induced by aggressive motions. Field robotics expose robots to various hazards, including steep terrains, landslides, and staircases, where substantial accelerations and angular velocities can occur if the robot loses stability and tumbles. These extreme motions can saturate sensor measurements, especially gyroscopes, which are the first sensors to become inoperative. While the structural integrity of the robot is at risk, the resilience of the SLAM framework is oftentimes given little consideration. Consequently, even if the robot is physically capable of continuing the mission, its operation will be compromised due to a corrupted representation of the world. Regarding this problem, we propose a way to estimate the angular velocity using accelerometers during extreme rotations caused by tumbling. We show that our method reduces the median localization error by 71.5 % in translation and 65.5 % in rotation and reduces the number of SLAM failures by 73.3 % on the collected data. We also propose the Tumbling-Induced Gyroscope Saturation (TIGS) dataset, which consists of outdoor experiments recording the motion of a lidar subject to angular velocities four times higher than other available datasets. The dataset is available online at https://github.com/norlab-ulaval/Norlab_wiki/wiki/TIGS-Dataset.
Pointing the Way: Refining Radar-Lidar Localization Using Learned ICP Weights
Sep 15, 2023This paper presents a novel deep-learning-based approach to improve localizing radar measurements against lidar maps. Although the state of the art for localization is matching lidar data to lidar maps, radar has been considered as a promising alternative, as it is potentially more resilient against adverse weather such as precipitation and heavy fog. To make use of existing high-quality lidar maps, while maintaining performance in adverse weather, matching radar data to lidar maps is of interest. However, owing in part to the unique artefacts present in radar measurements, radar-lidar localization has struggled to achieve comparable performance to lidar-lidar systems, preventing it from being viable for autonomous driving. This work builds on an ICP-based radar-lidar localization system by including a learned preprocessing step that weights radar points based on high-level scan information. Combining a proven analytical approach with a learned weight reduces localization errors in radar-lidar ICP results run on real-world autonomous driving data by up to 54.94% in translation and 68.39% in rotation, while maintaining interpretability and robustness.