 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeed for Speed: Fast Correspondence-Free Lidar Odometry Using Doppler Velocity
Mar 11, 2023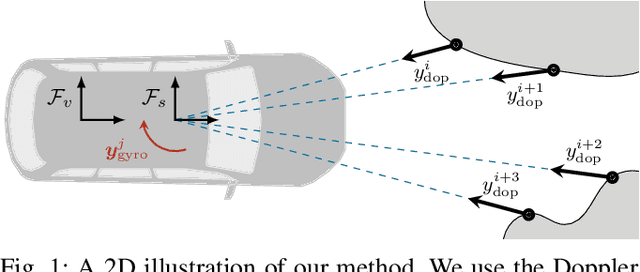
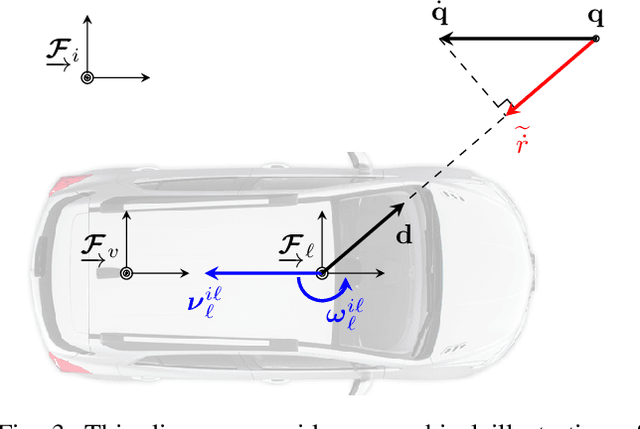
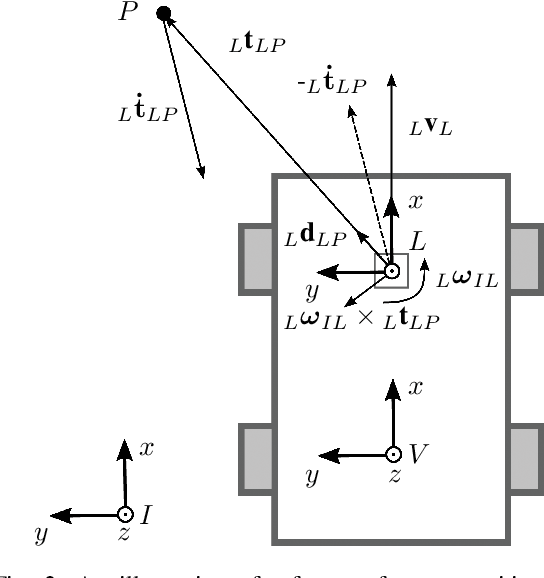
In this paper, we present a fast, lightweight odometry method that uses the Doppler velocity measurements from a Frequency-Modulated Continuous-Wave (FMCW) lidar without data association. FMCW lidar is a recently emerging technology that enables per-return relative radial velocity measurements via the Doppler effect. Since the Doppler measurement model is linear with respect to the 6-degrees-of-freedom (DOF) vehicle velocity, we can formulate a linear continuous-time estimation problem for the velocity and numerically integrate for the 6-DOF pose estimate afterward. The caveat is that angular velocity is not observable with a single FMCW lidar. We address this limitation by also incorporating the angular velocity measurements from a gyroscope. This results in an extremely efficient odometry method that processes lidar frames at an average wall-clock time of 5.8ms on a single thread, well below the 10Hz operating rate of the lidar we tested. We show experimental results on real-world driving sequences and compare against state-of-the-art Iterative Closest Point (ICP)-based odometry methods, presenting a compelling trade-off between accuracy and computation. We also present an algebraic observability study, where we demonstrate in theory that the Doppler measurements from multiple FMCW lidars are capable of observing all 6 degrees of freedom (translational and angular velocity).
Picking Up Speed: Continuous-Time Lidar-Only Odometry using Doppler Velocity Measurements
Sep 07, 2022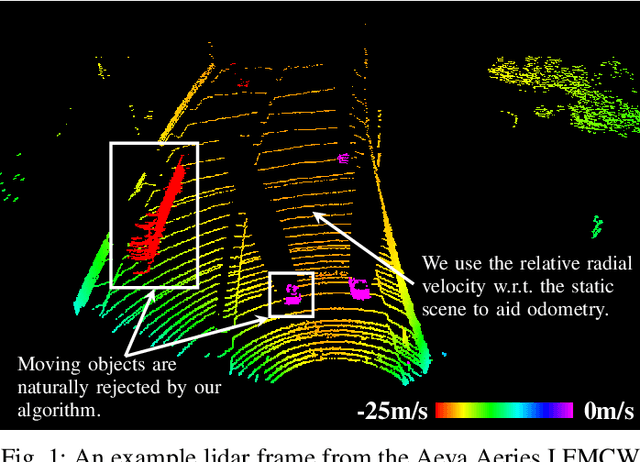
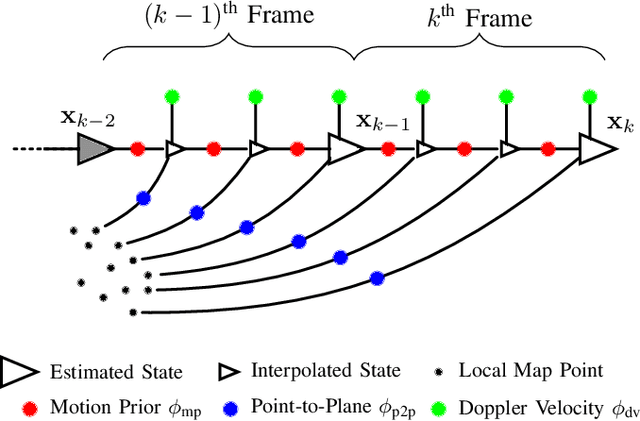
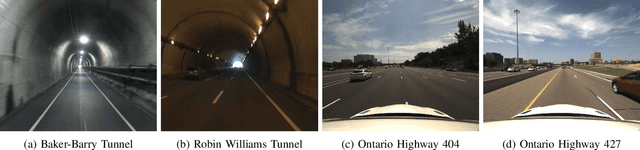
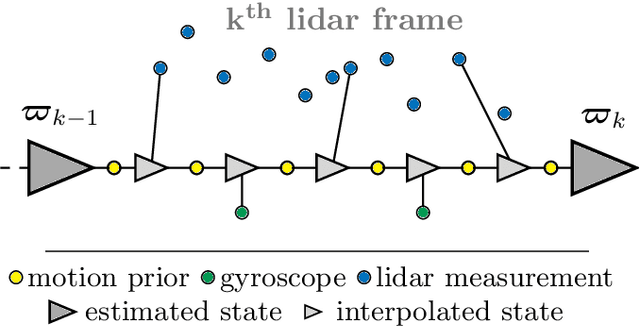
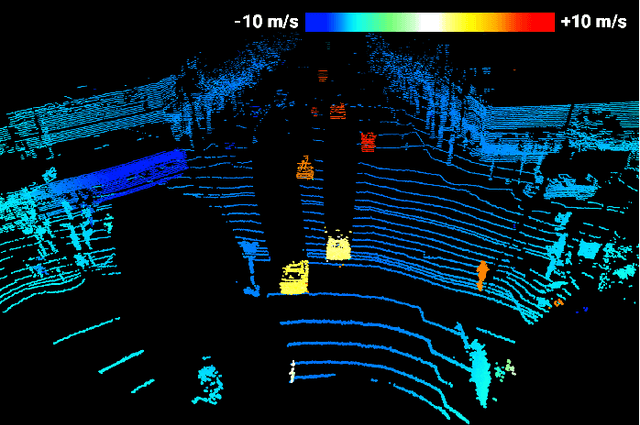
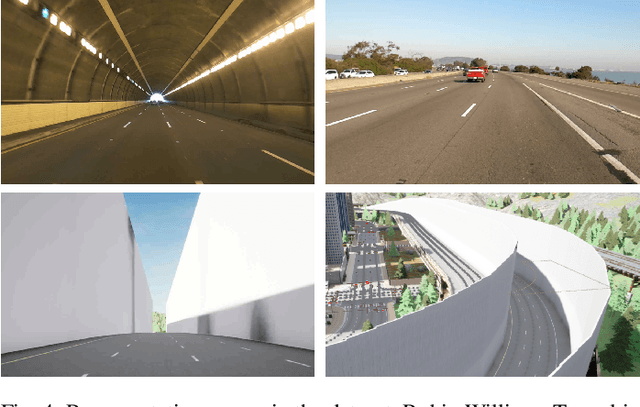
Frequency-Modulated Continuous-Wave (FMCW) lidar is a recently emerging technology that additionally enables per-return instantaneous relative radial velocity measurements via the Doppler effect. In this letter, we present the first continuous-time lidar-only odometry algorithm using these Doppler velocity measurements from an FMCW lidar to aid odometry in geometrically degenerate environments. We apply an existing continuous-time framework that efficiently estimates the vehicle trajectory using Gaussian process regression to compensate for motion distortion due to the scanning-while-moving nature of any mechanically actuated lidar (FMCW and non-FMCW). We evaluate our proposed algorithm on several real-world datasets, including publicly available ones and datasets we collected. Our algorithm outperforms the only existing method that also uses Doppler velocity measurements, and we study difficult conditions where including this extra information greatly improves performance. We additionally demonstrate state-of-the-art performance of lidar-only odometry with and without using Doppler velocity measurements in nominal conditions. Code for this project can be found at: https://github.com/utiasASRL/steam_icp.
DICP: Doppler Iterative Closest Point Algorithm
Jan 28, 2022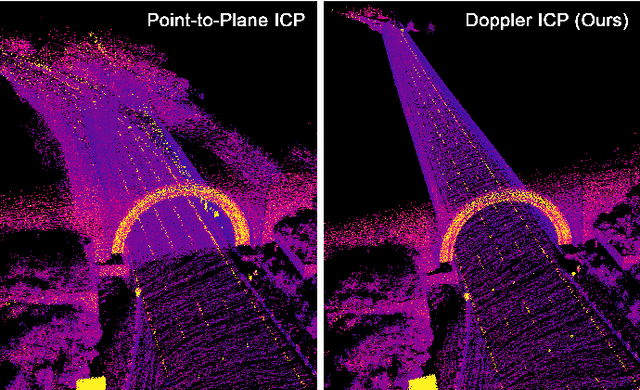
In this paper, we present a novel algorithm for point cloud registration for range sensors capable of measuring per-return instantaneous radial velocity: Doppler ICP. Existing variants of ICP that solely rely on geometry or other features generally fail to estimate the motion of the sensor correctly in scenarios that have non-distinctive features and/or repetitive geometric structures such as hallways, tunnels, highways, and bridges. We propose a new Doppler velocity objective function that exploits the compatibility of each point's Doppler measurement and the sensor's current motion estimate. We jointly optimize the Doppler velocity objective function and the geometric objective function which sufficiently constrains the point cloud alignment problem even in feature-denied environments. Furthermore, the correspondence matches used for the alignment are improved by pruning away the points from dynamic targets which generally degrade the ICP solution. We evaluate our method on data collected from real sensors and from simulation. Our results show a significant performance improvement in terms of the registration accuracy with the added benefit of faster convergence guided by the Doppler velocity gradients.