 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Navigation for Mobile Robots in Unknown 3D Environments
Sep 06, 2023



Autonomous navigation in unknown 3D environments is a key issue for intelligent transportation, while still being an open problem. Conventionally, navigation risk has been focused on mitigating collisions with obstacles, neglecting the varying degrees of harm that collisions can cause. In this context, we propose a new risk-aware navigation framework, whose purpose is to directly handle interactions with the environment, including those involving minor collisions. We introduce a physically interpretable risk function that quantifies the maximum potential energy that the robot wheels absorb as a result of a collision. By considering this physical risk in navigation, our approach significantly broadens the spectrum of situations that the robot can undertake, such as speed bumps or small road curbs. Using this framework, we are able to plan safe trajectories that not only ensure safety but also actively address the risks arising from interactions with the environment.
Dynamic Lambda-Field: A Counterpart of the Bayesian Occupancy Grid for Risk Assessment in Dynamic Environments
Mar 08, 2021
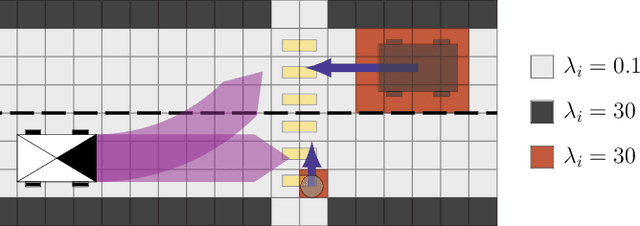
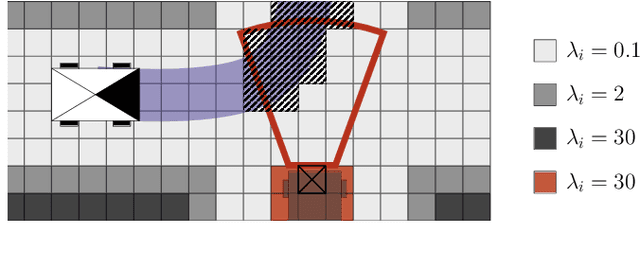
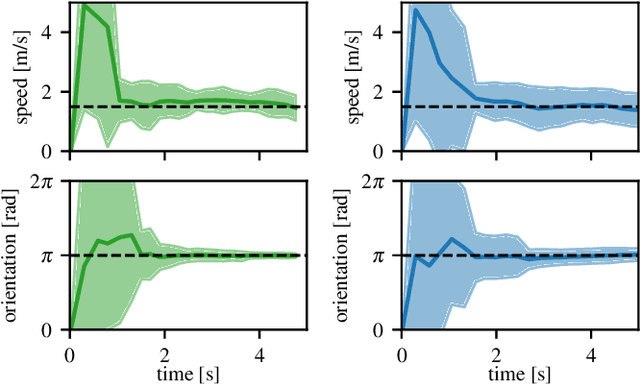
In the context of autonomous vehicles, one of the most crucial tasks is to estimate the risk of the undertaken action. While navigating in complex urban environments, the Bayesian occupancy grid is one of the most popular types of map, where the information of occupancy is stored as the probability of collision. Although widely used, this kind of representation is not well suited for risk assessment: because of its discrete nature, the probability of collision becomes dependent on the tessellation size. Therefore, risk assessments on Bayesian occupancy grids cannot yield risks with meaningful physical units. In this article, we propose an alternative framework called Dynamic Lambda-Field that is able to assess physical risks in dynamic environments without being dependent on the tessellation size. Using our framework, we are able to plan safe trajectories where the risk function can be adjusted depending on the scenario. We validate our approach with quantitative experiments, showing the convergence speed of the grid and that the framework is suitable for real-world scenarios.