 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Lambda-Field: A Counterpart of the Bayesian Occupancy Grid for Risk Assessment in Dynamic Environments
Mar 08, 2021
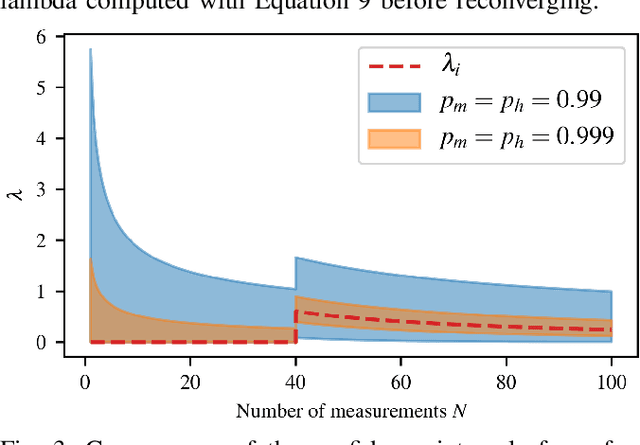
In the context of autonomous vehicles, one of the most crucial tasks is to estimate the risk of the undertaken action. While navigating in complex urban environments, the Bayesian occupancy grid is one of the most popular types of map, where the information of occupancy is stored as the probability of collision. Although widely used, this kind of representation is not well suited for risk assessment: because of its discrete nature, the probability of collision becomes dependent on the tessellation size. Therefore, risk assessments on Bayesian occupancy grids cannot yield risks with meaningful physical units. In this article, we propose an alternative framework called Dynamic Lambda-Field that is able to assess physical risks in dynamic environments without being dependent on the tessellation size. Using our framework, we are able to plan safe trajectories where the risk function can be adjusted depending on the scenario. We validate our approach with quantitative experiments, showing the convergence speed of the grid and that the framework is suitable for real-world scenarios.
Lambda-Field: A Continuous Counterpart Of The Bayesian Occupancy Grid For Risk Assessment And Safe Navigation
Nov 16, 2020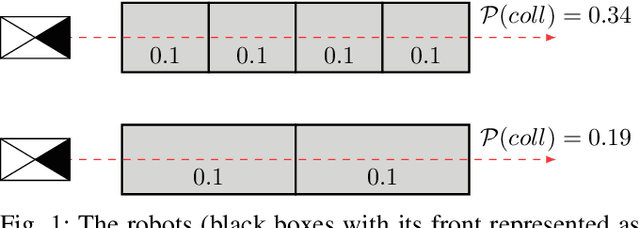
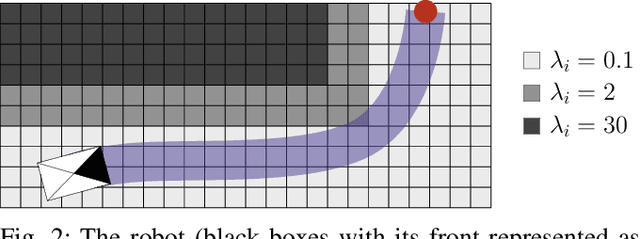
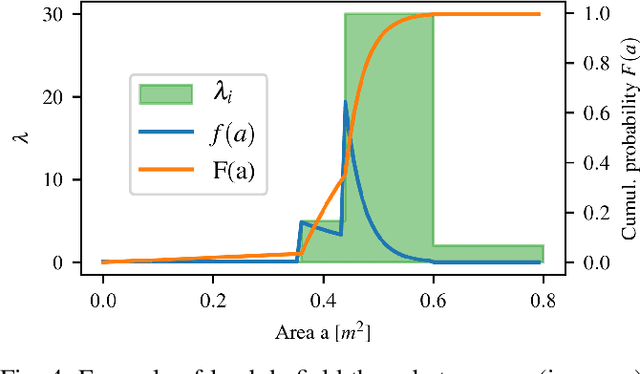
In the context of autonomous robots, one of the most important tasks is to prevent potential damages on the robot during navigation. For this purpose, it is often assumed to deal with known probabilistic obstacles, then to compute the probability of collision to each obstacle. However, in complex scenarios or unstructured environments, it might be difficult to detect such obstacles. In this case, a metric map is used where each position stores the information of occupancy. The most common type of metric map is the bayesian occupancy map. However, this type of map is not well fitted to compute risk assessment for continuous paths due to its discrete nature. Hence, we introduce a novel type of map called Lambda-Field, specially designed for risk assessment. We first propose a way to compute such a map and the expectancy of a generic risk over a path. Then, we demonstrate the utility of our generic formulation with a use case defining the risk as the expected force of collision over a path. Using this risk definition and the Lambda-Field, we show that our framework is capable of doing classical path planning while having a physical-based metric. Furthermore, the Lambda-Field gives a natural way to deal with unstructured environments like tall grass. Where standard environment representations would generate trajectories going around such obstacles, our framework allows the robot to go through the grass while being aware of the risk taken.
A Collaborative Framework for High-Definition Mapping
Oct 14, 2019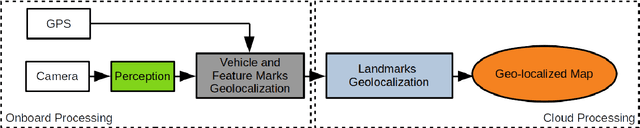
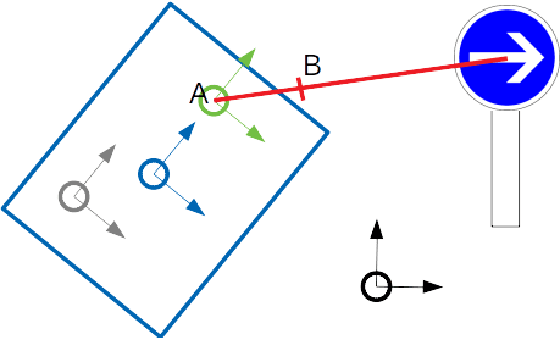
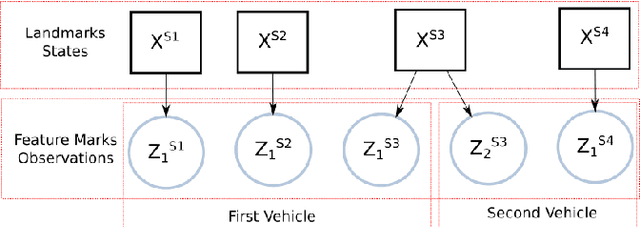
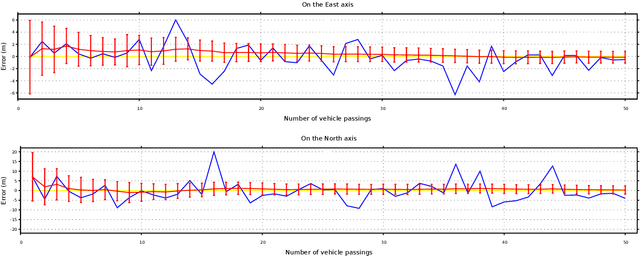
For connected vehicles to have a substantial effect on road safety, it is required that accurate positions and trajectories can be shared. To this end, all vehicles must be accurately geo-localized in a common frame. This can be achieved by merging GNSS (Global Navigation Satellite System) information and visual observations matched with a map of geo-positioned landmarks. Building such a map remains a challenge, and current solutions are facing strong cost-related limitations. We present a collaborative framework for high-definition mapping, in which vehicles equipped with standard sensors, such as a GNSS receiver and a mono-visual camera, update a map of geo-localized landmarks. Our system is composed of two processing blocks: the first one is embedded in each vehicle, and aims at geo-localizing the vehicle and the detected feature marks. The second is operated on cloud servers, and uses observations from all the vehicles to compute updates for the map of geo-positioned landmarks. As the map's landmarks are detected and positioned by more and more vehicles, the accuracy of the map increases, eventually converging in probability towards a null error. The landmarks' geo-positions are estimated in a stable and scalable way, enabling to provide dynamic map updates in an automatic manner.
* 2019 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
Lambda-Field: A Continuous Counterpart of the Bayesian Occupancy Grid for Risk Assessment
Mar 06, 2019In a context of autonomous robots, one of the most important task is to ensure the safety of the robot and its surrounding. Most of the time, the risk of navigation is simply said to be the probability of collision. This notion of risk is not well defined in the literature, especially when dealing with occupancy grids. The Bayesian occupancy grid is the most used method to deal with complex environments. However, this is not fitted to compute the risk along a path by its discrete nature, hence giving poor results. In this article, we present a new way to store the occupancy of the environment that allows the computation of risk for a given path. We then define the risk as the force of collision that would occur for a given obstacle. Using this framework, we are able to generate navigation paths ensuring the safety of the robot.