 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASAP-MO:Advanced Situational Awareness and Perception for Mission-critical Operations
May 02, 2025Deploying robotic missions can be challenging due to the complexity of controlling robots with multiple degrees of freedom, fusing diverse sensory inputs, and managing communication delays and interferences. In nuclear inspection, robots can be crucial in assessing environments where human presence is limited, requiring precise teleoperation and coordination. Teleoperation requires extensive training, as operators must process multiple outputs while ensuring safe interaction with critical assets. These challenges are amplified when operating a fleet of heterogeneous robots across multiple environments, as each robot may have distinct control interfaces, sensory systems, and operational constraints. Efficient coordination in such settings remains an open problem. This paper presents a field report on how we integrated robot fleet capabilities - including mapping, localization, and telecommunication - toward a joint mission. We simulated a nuclear inspection scenario for exposed areas, using lights to represent a radiation source. We deployed two Unmanned Ground Vehicles (UGVs) tasked with mapping indoor and outdoor environments while remotely controlled from a single base station. Despite having distinct operational goals, the robots produced a unified map output, demonstrating the feasibility of coordinated multi-robot missions. Our results highlight key operational challenges and provide insights into improving adaptability and situational awareness in remote robotic deployments.
Under Pressure: Altimeter-Aided ICP for 3D Maps Consistency
Oct 01, 2024We propose a novel method to enhance the accuracy of the Iterative Closest Point (ICP) algorithm by integrating altitude constraints from a barometric pressure sensor. While ICP is widely used in mobile robotics for Simultaneous Localization and Mapping ( SLAM ), it is susceptible to drift, especially in underconstrained environments such as vertical shafts. To address this issue, we propose to augment ICP with altimeter measurements, reliably constraining drifts along the gravity vector. To demonstrate the potential of altimetry in SLAM , we offer an analysis of calibration procedures and noise sensitivity of various pressure sensors, improving measurements to centimeter-level accuracy. Leveraging this accuracy, we propose a novel ICP formulation that integrates altitude measurements along the gravity vector, thus simplifying the optimization problem to 3-Degree Of Freedom (DOF). Experimental results from real-world deployments demonstrate that our method reduces vertical drift by 84% and improves overall localization accuracy compared to state-of-the-art methods in non-planar environments.
Comparing Motion Distortion Between Vehicle Field Deployments
Apr 30, 2024


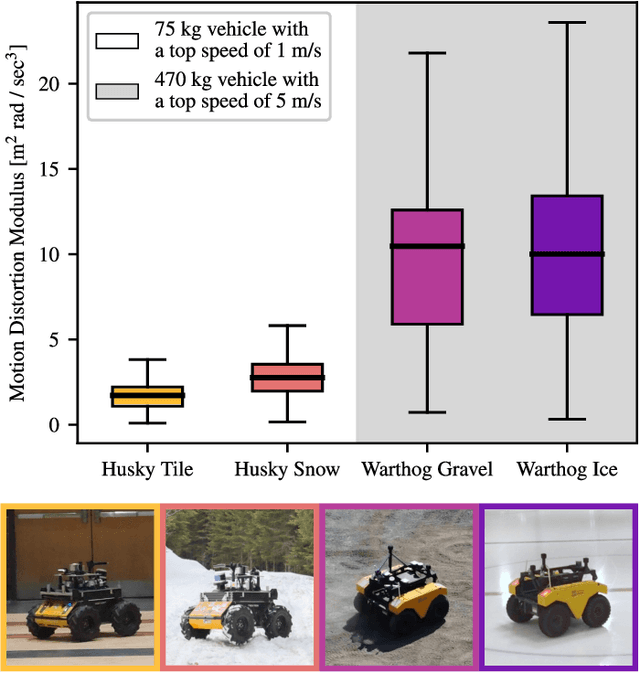
Recent advances in autonomous driving for uncrewed ground vehicles (UGVs) have spurred significant development, particularly in challenging terrains. This paper introduces a classification system assessing various UGV deployments reported in the literature. Our approach considers motion distortion features that include internal UGV features, such as mass and speed, and external features, such as terrain complexity, which all influence the efficiency of models and navigation systems. We present results that map UGV deployments relative to vehicle kinetic energy and terrain complexity, providing insights into the level of complexity and risk associated with different operational environments. Additionally, we propose a motion distortion metric to assess UGV navigation performance that does not require an explicit quantification of motion distortion features. Using this metric, we conduct a case study to illustrate the impact of motion distortion features on modeling accuracy. This research advocates for creating a comprehensive database containing many different motion distortion features, which would contribute to advancing the understanding of autonomous driving capabilities in rough conditions and provide a validation framework for future developments in UGV navigation systems.