 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparing Motion Distortion Between Vehicle Field Deployments
Apr 30, 2024


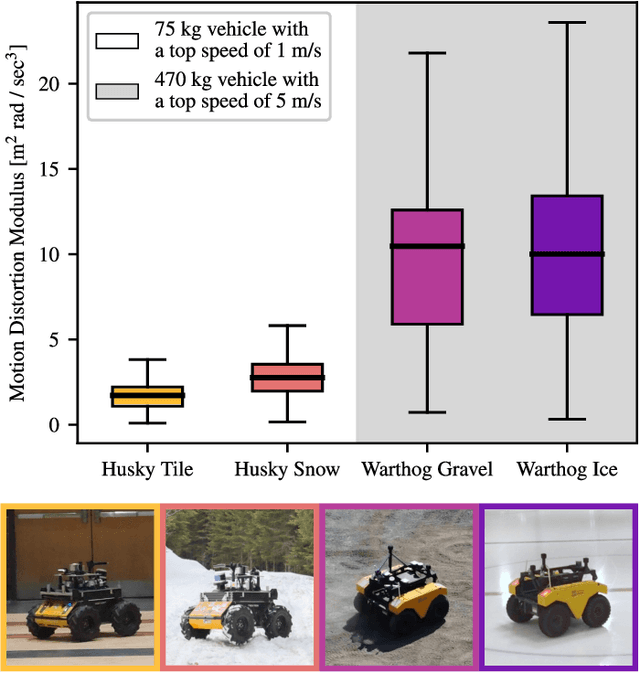
Recent advances in autonomous driving for uncrewed ground vehicles (UGVs) have spurred significant development, particularly in challenging terrains. This paper introduces a classification system assessing various UGV deployments reported in the literature. Our approach considers motion distortion features that include internal UGV features, such as mass and speed, and external features, such as terrain complexity, which all influence the efficiency of models and navigation systems. We present results that map UGV deployments relative to vehicle kinetic energy and terrain complexity, providing insights into the level of complexity and risk associated with different operational environments. Additionally, we propose a motion distortion metric to assess UGV navigation performance that does not require an explicit quantification of motion distortion features. Using this metric, we conduct a case study to illustrate the impact of motion distortion features on modeling accuracy. This research advocates for creating a comprehensive database containing many different motion distortion features, which would contribute to advancing the understanding of autonomous driving capabilities in rough conditions and provide a validation framework for future developments in UGV navigation systems.
DRIVE: Data-driven Robot Input Vector Exploration
Sep 19, 2023An accurate motion model is a fundamental component of most autonomous navigation systems. While much work has been done on improving model formulation, no standard protocol exists for gathering empirical data required to train models. In this work, we address this issue by proposing Data-driven Robot Input Vector Exploration (DRIVE), a protocol that enables characterizing uncrewed ground vehicles (UGVs) input limits and gathering empirical model training data. We also propose a novel learned slip approach outperforming similar acceleration learning approaches. Our contributions are validated through an extensive experimental evaluation, cumulating over 7 km and 1.8 h of driving data over three distinct UGVs and four terrain types. We show that our protocol offers increased predictive performance over common human-driven data-gathering protocols. Furthermore, our protocol converges with 46 s of training data, almost four times less than the shortest human dataset gathering protocol. We show that the operational limit for our model is reached in extreme slip conditions encountered on surfaced ice. DRIVE is an efficient way of characterizing UGV motion in its operational conditions. Our code and dataset are both available online at this link: https://github.com/norlab-ulaval/DRIVE.