 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeField Report on a Wearable and Versatile Solution for Field Acquisition and Exploration
Paper and Code

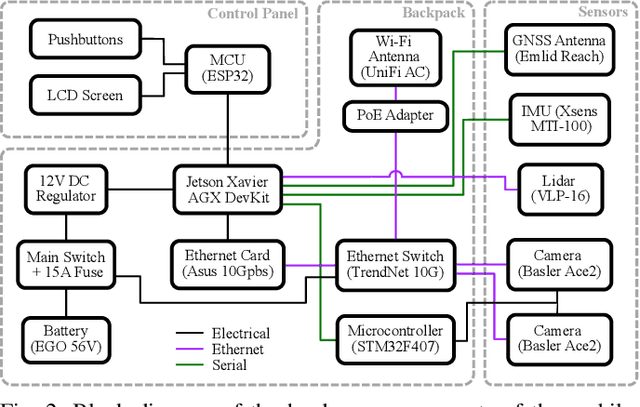
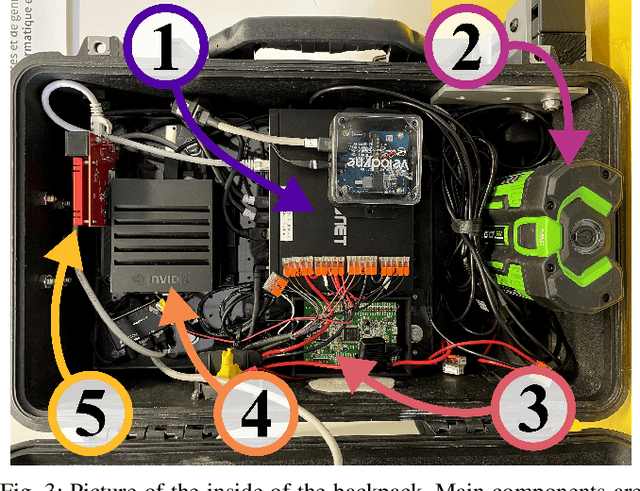

This report presents a wearable plug-and-play platform for data acquisition in the field. The platform, extending a waterproof Pelican Case into a 20 kg backpack offers 5.5 hours of power autonomy, while recording data with two cameras, a lidar, an Inertial Measurement Unit (IMU), and a Global Navigation Satellite System (GNSS) receiver. The system only requires a single operator and is readily controlled with a built-in screen and buttons. Due to its small footprint, it offers greater flexibility than large vehicles typically deployed in off-trail environments. We describe the platform's design, detailing the mechanical parts, electrical components, and software stack. We explain the system's limitations, drawing from its extensive deployment spanning over 20 kilometers of trajectories across various seasons, environments, and weather conditions. We derive valuable lessons learned from these deployments and present several possible applications for the system. The possible use cases consider not only academic research but also insights from consultations with our industrial partners. The mechanical design including all CAD files, as well as the software stack, are publicly available at https://github.com/norlab-ulaval/backpack_workspace.