 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltra-wideband Time Difference of Arrival Indoor Localization: From Sensor Placement to System Evaluation
Dec 17, 2024Wireless indoor localization has attracted significant research interest due to its high accuracy, low cost, lightweight design, and low power consumption. Specifically, ultra-wideband (UWB) time difference of arrival (TDOA)-based localization has emerged as a scalable positioning solution for mobile robots, consumer electronics, and wearable devices, featuring good accuracy and reliability. While UWB TDOA-based localization systems rely on the deployment of UWB radio sensors as positioning landmarks, existing works often assume these placements are predetermined or study the sensor placement problem alone without evaluating it in practical scenarios. In this article, we bridge this gap by approaching the UWB TDOA localization from a system-level perspective, integrating sensor placement as a key component and conducting practical evaluation in real-world scenarios. Through extensive real-world experiments, we demonstrate the accuracy and robustness of our localization system, comparing its performance to the theoretical lower bounds. Using a challenging multi-room environment as a case study, we illustrate the full system construction process, from sensor placement optimization to real-world deployment. Our evaluation, comprising a cumulative total of 39 minutes of real-world experiments involving up to five agents and covering 2608 meters across four distinct scenarios, provides valuable insights and guidelines for constructing UWB TDOA localization systems.
Range-Visual-Inertial Sensor Fusion for Micro Aerial Vehicle Localization and Navigation
Nov 15, 2023
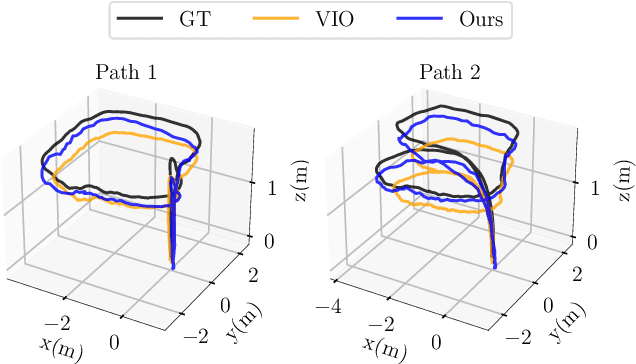


We propose a fixed-lag smoother-based sensor fusion architecture to leverage the complementary benefits of range-based sensors and visual-inertial odometry (VIO) for localization. We use two fixed-lag smoothers (FLS) to decouple accurate state estimation and high-rate pose generation for closed-loop control. The first FLS combines ultrawideband (UWB)-based range measurements and VIO to estimate the robot trajectory and any systematic biases that affect the range measurements in cluttered environments. The second FLS estimates smooth corrections to VIO to generate pose estimates at a high rate for online control. The proposed method is lightweight and can run on a computationally constrained micro-aerial vehicle (MAV). We validate our approach through closed-loop flight tests involving dynamic trajectories in multiple real-world cluttered indoor environments. Our method achieves decimeter-to-sub-decimeter-level positioning accuracy using off-the-shelf sensors and decimeter-level tracking accuracy with minimally-tuned open-source controllers.
A Remote Sim2real Aerial Competition: Fostering Reproducibility and Solutions' Diversity in Robotics Challenges
Aug 31, 2023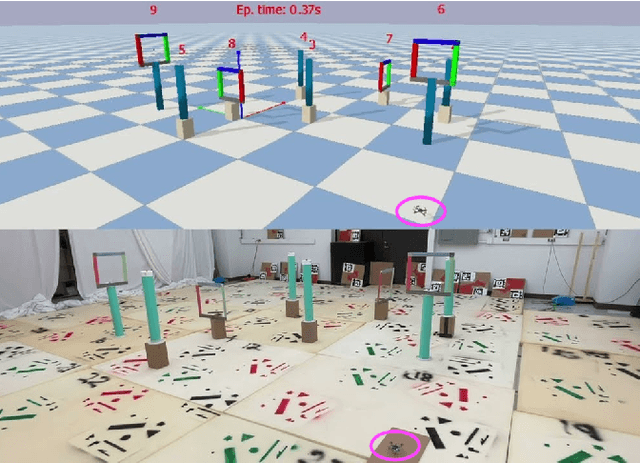

Shared benchmark problems have historically been a fundamental driver of progress for scientific communities. In the context of academic conferences, competitions offer the opportunity to researchers with different origins, backgrounds, and levels of seniority to quantitatively compare their ideas. In robotics, a hot and challenging topic is sim2real-porting approaches that work well in simulation to real robot hardware. In our case, creating a hybrid competition with both simulation and real robot components was also dictated by the uncertainties around travel and logistics in the post-COVID-19 world. Hence, this article motivates and describes an aerial sim2real robot competition that ran during the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems, from the specification of the competition task, to the details of the software infrastructure supporting simulation and real-life experiments, to the approaches of the top-placed teams and the lessons learned by participants and organizers.
Uncertainty-aware Gaussian Mixture Model for UWB Time Difference of Arrival Localization in Cluttered Environments
Jul 31, 2023Ultra-wideband (UWB) time difference of arrival(TDOA)-based localization has emerged as a low-cost and scalable indoor positioning solution. However, in cluttered environments, the performance of UWB TDOA-based localization deteriorates due to the biased and non-Gaussian noise distributions induced by obstacles. In this work, we present a bi-level optimization-based joint localization and noise model learning algorithm to address this problem. In particular, we use a Gaussian mixture model (GMM) to approximate the measurement noise distribution. We explicitly incorporate the estimated state's uncertainty into the GMM noise model learning, referred to as uncertainty-aware GMM, to improve both noise modeling and localization performance. We first evaluate the GMM noise model learning and localization performance in numerous simulation scenarios. We then demonstrate the effectiveness of our algorithm in extensive real-world experiments using two different cluttered environments. We show that our algorithm provides accurate position estimates with low-cost UWB sensors, no prior knowledge about the obstacles in the space, and a significant amount of UWB radios occluded.
Interactive Feature Embedding for Infrared and Visible Image Fusion
Nov 09, 2022General deep learning-based methods for infrared and visible image fusion rely on the unsupervised mechanism for vital information retention by utilizing elaborately designed loss functions. However, the unsupervised mechanism depends on a well designed loss function, which cannot guarantee that all vital information of source images is sufficiently extracted. In this work, we propose a novel interactive feature embedding in self-supervised learning framework for infrared and visible image fusion, attempting to overcome the issue of vital information degradation. With the help of self-supervised learning framework, hierarchical representations of source images can be efficiently extracted. In particular, interactive feature embedding models are tactfully designed to build a bridge between the self-supervised learning and infrared and visible image fusion learning, achieving vital information retention. Qualitative and quantitative evaluations exhibit that the proposed method performs favorably against state-of-the-art methods.
SRRT: Search Region Regulation Tracking
Jul 10, 2022
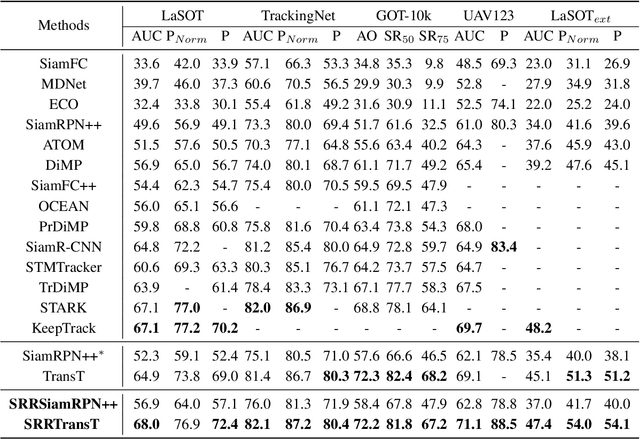


Dominant trackers generate a fixed-size rectangular region based on the previous prediction or initial bounding box as the model input, i.e., search region. While this manner leads to improved tracking efficiency, a fixed-size search region lacks flexibility and is likely to fail in cases, e.g., fast motion and distractor interference. Trackers tend to lose the target object due to the limited search region or be interfered by distractors due to excessive search region. In this work, we propose a novel tracking paradigm, called Search Region Regulation Tracking (SRRT), which applies a proposed search region regulator to estimate an optimal search region dynamically for every frame. To adapt the object's appearance variation during tracking, we further propose a locking-state determined updating strategy for reference frame updating. Our SRRT framework is very concise without fancy design, yet achieves evident improvements on the baselines and competitive results with other state-of-the-art trackers on seven challenging benchmarks. On the large-scale LaSOT benchmark, our SRRT improves SiamRPN++ and TransT with the absolute gains of 4.6% and 3.1% in terms of AUC.
Finding the Right Place: Sensor Placement for UWB Time Difference of Arrival Localization in Cluttered Indoor Environments
Apr 09, 2022


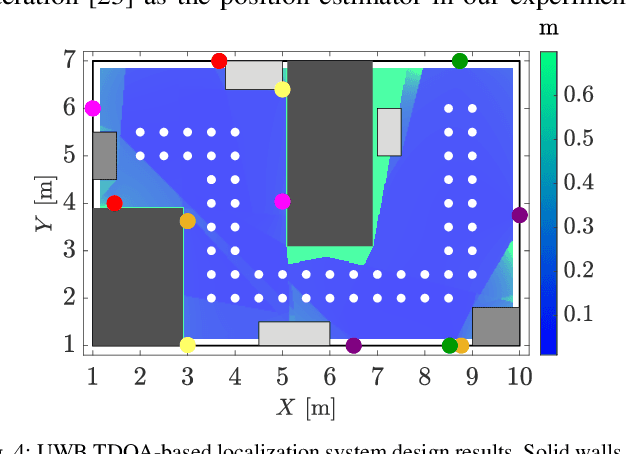
Ultra-wideband (UWB) time difference of arrival (TDOA)-based localization has recently emerged as a promising indoor positioning solution. However, in cluttered environments, both the UWB radio positions and the obstacle-induced non-line-of-sight (NLOS) measurement biases significantly impact the quality of the position estimate. Consequently, the placement of the UWB radios must be carefully designed to provide satisfactory localization accuracy for a region of interest. In this work, we propose a novel algorithm that optimizes the UWB radio positions for a pre-defined region of interest in the presence of obstacles. The mean-squared error (MSE) metric is used to formulate an optimization problem that balances the influence of the geometry of the radio positions and the NLOS effects. We further apply the proposed algorithm to compute a minimal number of UWB radios required for a desired localization accuracy and their corresponding positions. In a real-world cluttered environment, we show that the designed UWB radio placements provide 47% and 76% localization root-mean-squared error (RMSE) reduction in 2D and 3D experiments, respectively, when compared against trivial placements.
UTIL: An Ultra-wideband Time-difference-of-arrival Indoor Localization Dataset
Mar 28, 2022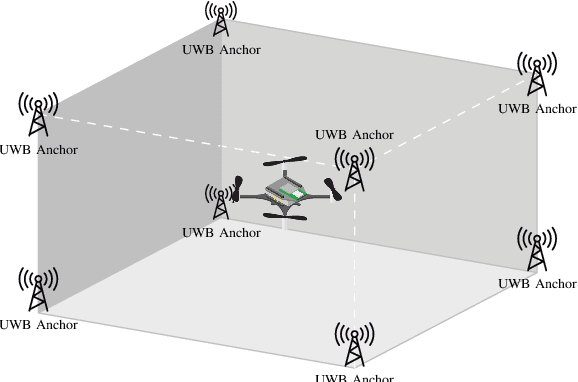
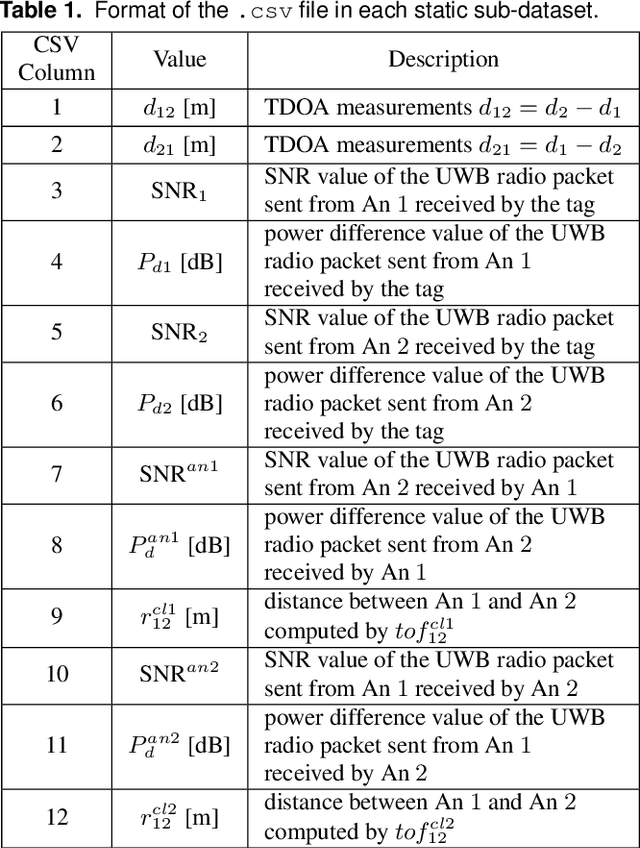


This paper presents an ultra-wideband (UWB) time-difference-of-arrival (TDOA) dataset collected from a quadrotor for research purposes. The dataset consists of low-level signal information from static experiments and UWB TDOA measurements and additional onboard sensor data from flight experiments on a quadrotor. The data collection process is discussed in detail, including the equipment used, measurement collection procedure, and the calibration of the quadrotor platform. All the data is made available as plain text files and we provide both Matlab and Python scripts to parse and analyze the data. We provide a thorough description of the data format and some pointers on the potential usage of each sub-dataset. The dataset is available for download at https://utiasdsl.github.io/util-uwb-dataset/. We hope this dataset will help researchers develop and compare reliable estimation methods for the emerging UWB TDOA-based indoor localization technology.
Bridging the Model-Reality Gap with Lipschitz Network Adaptation
Dec 07, 2021

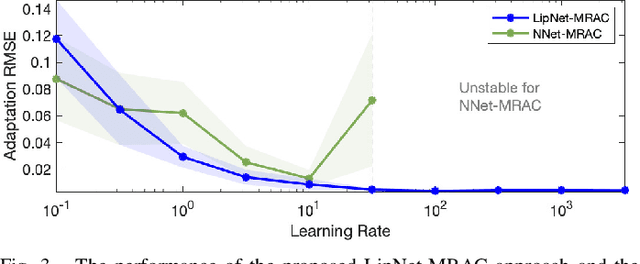
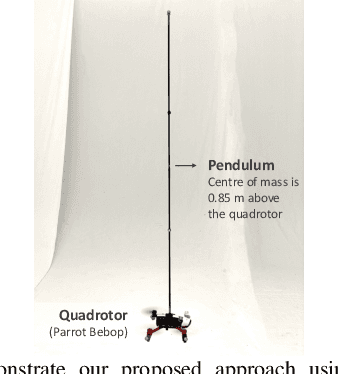
As robots venture into the real world, they are subject to unmodeled dynamics and disturbances. Traditional model-based control approaches have been proven successful in relatively static and known operating environments. However, when an accurate model of the robot is not available, model-based design can lead to suboptimal and even unsafe behaviour. In this work, we propose a method that bridges the model-reality gap and enables the application of model-based approaches even if dynamic uncertainties are present. In particular, we present a learning-based model reference adaptation approach that makes a robot system, with possibly uncertain dynamics, behave as a predefined reference model. In turn, the reference model can be used for model-based controller design. In contrast to typical model reference adaptation control approaches, we leverage the representative power of neural networks to capture highly nonlinear dynamics uncertainties and guarantee stability by encoding a certifying Lipschitz condition in the architectural design of a special type of neural network called the Lipschitz network. Our approach applies to a general class of nonlinear control-affine systems even when our prior knowledge about the true robot system is limited. We demonstrate our approach in flying inverted pendulum experiments, where an off-the-shelf quadrotor is challenged to balance an inverted pendulum while hovering or tracking circular trajectories.
Learning-based Bias Correction for Time Difference of Arrival Ultra-wideband Localization of Resource-constrained Mobile Robots
Mar 02, 2021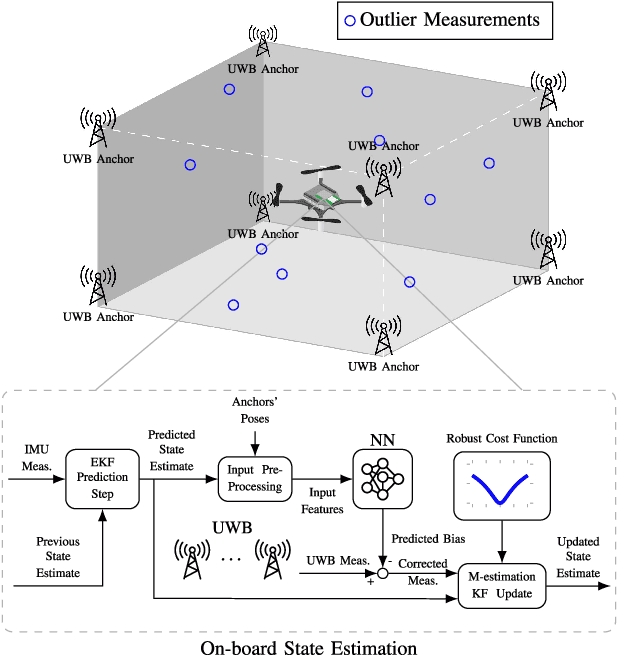

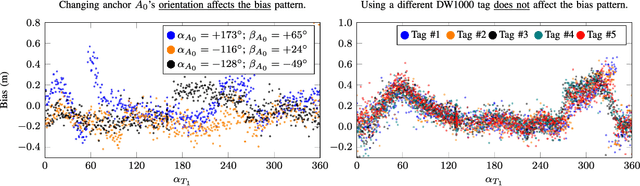
Accurate indoor localization is a crucial enabling technology for many robotics applications, from warehouse management to monitoring tasks. Ultra-wideband (UWB) time difference of arrival (TDOA)-based localization is a promising lightweight, low-cost solution that can scale to a large number of devices -- making it especially suited for resource-constrained multi-robot applications. However, the localization accuracy of standard, commercially available UWB radios is often insufficient due to significant measurement bias and outliers. In this letter, we address these issues by proposing a robust UWB TDOA localization framework comprising of (i) learning-based bias correction and (ii) M-estimation-based robust filtering to handle outliers. The key properties of our approach are that (i) the learned biases generalize to different UWB anchor setups and (ii) the approach is computationally efficient enough to run on resource-constrained hardware. We demonstrate our approach on a Crazyflie nano-quadcopter. Experimental results show that the proposed localization framework, relying only on the onboard IMU and UWB, provides an average of 42.08 percent localization error reduction (in three different anchor setups) compared to the baseline approach without bias compensation. {We also show autonomous trajectory tracking on a quadcopter using our UWB TDOA localization approach.}