 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltra-wideband Time Difference of Arrival Indoor Localization: From Sensor Placement to System Evaluation
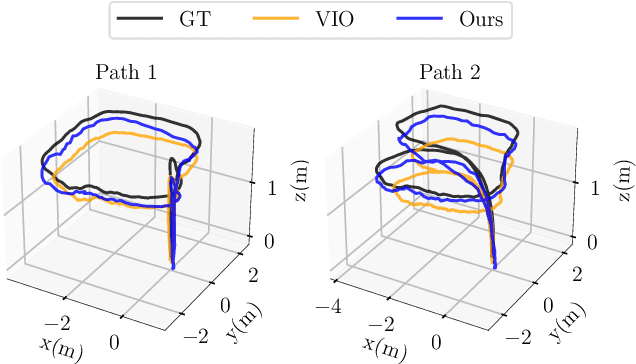
Dec 17, 2024Wireless indoor localization has attracted significant research interest due to its high accuracy, low cost, lightweight design, and low power consumption. Specifically, ultra-wideband (UWB) time difference of arrival (TDOA)-based localization has emerged as a scalable positioning solution for mobile robots, consumer electronics, and wearable devices, featuring good accuracy and reliability. While UWB TDOA-based localization systems rely on the deployment of UWB radio sensors as positioning landmarks, existing works often assume these placements are predetermined or study the sensor placement problem alone without evaluating it in practical scenarios. In this article, we bridge this gap by approaching the UWB TDOA localization from a system-level perspective, integrating sensor placement as a key component and conducting practical evaluation in real-world scenarios. Through extensive real-world experiments, we demonstrate the accuracy and robustness of our localization system, comparing its performance to the theoretical lower bounds. Using a challenging multi-room environment as a case study, we illustrate the full system construction process, from sensor placement optimization to real-world deployment. Our evaluation, comprising a cumulative total of 39 minutes of real-world experiments involving up to five agents and covering 2608 meters across four distinct scenarios, provides valuable insights and guidelines for constructing UWB TDOA localization systems.
Time-Optimal Planning for Long-Range Quadrotor Flights: An Automatic Optimal Synthesis Approach
Jul 25, 2024Time-critical tasks such as drone racing typically cover large operation areas. However, it is difficult and computationally intensive for current time-optimal motion planners to accommodate long flight distances since a large yet unknown number of knot points is required to represent the trajectory. We present a polynomial-based automatic optimal synthesis (AOS) approach that can address this challenge. Our method not only achieves superior time optimality but also maintains a consistently low computational cost across different ranges while considering the full quadrotor dynamics. First, we analyze the properties of time-optimal quadrotor maneuvers to determine the minimal number of polynomial pieces required to capture the dominant structure of time-optimal trajectories. This enables us to represent substantially long minimum-time trajectories with a minimal set of variables. Then, a robust optimization scheme is developed to handle arbitrary start and end conditions as well as intermediate waypoints. Extensive comparisons show that our approach is faster than the state-of-the-art approach by orders of magnitude with comparable time optimality. Real-world experiments further validate the quality of the resulting trajectories, demonstrating aggressive time-optimal maneuvers with a peak velocity of 8.86 m/s.
Range-Visual-Inertial Sensor Fusion for Micro Aerial Vehicle Localization and Navigation
Nov 15, 2023


We propose a fixed-lag smoother-based sensor fusion architecture to leverage the complementary benefits of range-based sensors and visual-inertial odometry (VIO) for localization. We use two fixed-lag smoothers (FLS) to decouple accurate state estimation and high-rate pose generation for closed-loop control. The first FLS combines ultrawideband (UWB)-based range measurements and VIO to estimate the robot trajectory and any systematic biases that affect the range measurements in cluttered environments. The second FLS estimates smooth corrections to VIO to generate pose estimates at a high rate for online control. The proposed method is lightweight and can run on a computationally constrained micro-aerial vehicle (MAV). We validate our approach through closed-loop flight tests involving dynamic trajectories in multiple real-world cluttered indoor environments. Our method achieves decimeter-to-sub-decimeter-level positioning accuracy using off-the-shelf sensors and decimeter-level tracking accuracy with minimally-tuned open-source controllers.
Optimal Initialization Strategies for Range-Only Trajectory Estimation
Sep 16, 2023Range-only (RO) pose estimation involves determining a robot's pose over time by measuring the distance between multiple devices on the robot, known as tags, and devices installed in the environment, known as anchors. The nonconvex nature of the range measurement model results in a cost function with possible local minima. In the absence of a good initialization, commonly used iterative solvers can get stuck in these local minima resulting in poor trajectory estimation accuracy. In this work, we propose convex relaxations to the original nonconvex problem based on semidefinite programs (SDPs). Specifically, we formulate computationally tractable SDP relaxations to obtain accurate initial pose and trajectory estimates for RO trajectory estimation under static and dynamic (i.e., constant-velocity motion) conditions. Through simulation and real experiments, we demonstrate that our proposed initialization strategies estimate the initial state accurately compared to iterative local solvers. Additionally, the proposed relaxations recover global minima under moderate range measurement noise levels.
Uncertainty-aware Gaussian Mixture Model for UWB Time Difference of Arrival Localization in Cluttered Environments
Jul 31, 2023Ultra-wideband (UWB) time difference of arrival(TDOA)-based localization has emerged as a low-cost and scalable indoor positioning solution. However, in cluttered environments, the performance of UWB TDOA-based localization deteriorates due to the biased and non-Gaussian noise distributions induced by obstacles. In this work, we present a bi-level optimization-based joint localization and noise model learning algorithm to address this problem. In particular, we use a Gaussian mixture model (GMM) to approximate the measurement noise distribution. We explicitly incorporate the estimated state's uncertainty into the GMM noise model learning, referred to as uncertainty-aware GMM, to improve both noise modeling and localization performance. We first evaluate the GMM noise model learning and localization performance in numerous simulation scenarios. We then demonstrate the effectiveness of our algorithm in extensive real-world experiments using two different cluttered environments. We show that our algorithm provides accurate position estimates with low-cost UWB sensors, no prior knowledge about the obstacles in the space, and a significant amount of UWB radios occluded.
Continuous-Time Range-Only Pose Estimation
Apr 18, 2023Range-only (RO) localization involves determining the position of a mobile robot by measuring the distance to specific anchors. RO localization is challenging since the measurements are low-dimensional and a single range sensor does not have enough information to estimate the full pose of the robot. As such, range sensors are typically coupled with other sensing modalities such as wheel encoders or inertial measurement units (IMUs) to estimate the full pose. In this work, we propose a continuous-time Gaussian process (GP)- based trajectory estimation method to estimate the full pose of a robot using only range measurements from multiple range sensors. Results from simulation and real experiments show that our proposed method, using off-the-shelf range sensors, is able to achieve comparable performance and in some cases outperform alternative state-of-the-art sensor-fusion methods that use additional sensing modalities.
Finding the Right Place: Sensor Placement for UWB Time Difference of Arrival Localization in Cluttered Indoor Environments
Apr 09, 2022


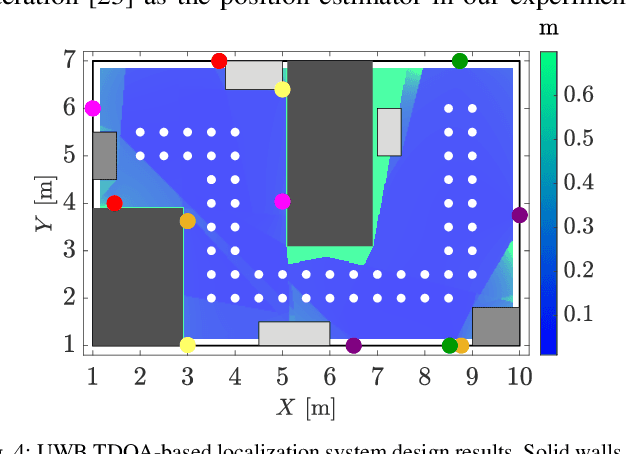
Ultra-wideband (UWB) time difference of arrival (TDOA)-based localization has recently emerged as a promising indoor positioning solution. However, in cluttered environments, both the UWB radio positions and the obstacle-induced non-line-of-sight (NLOS) measurement biases significantly impact the quality of the position estimate. Consequently, the placement of the UWB radios must be carefully designed to provide satisfactory localization accuracy for a region of interest. In this work, we propose a novel algorithm that optimizes the UWB radio positions for a pre-defined region of interest in the presence of obstacles. The mean-squared error (MSE) metric is used to formulate an optimization problem that balances the influence of the geometry of the radio positions and the NLOS effects. We further apply the proposed algorithm to compute a minimal number of UWB radios required for a desired localization accuracy and their corresponding positions. In a real-world cluttered environment, we show that the designed UWB radio placements provide 47% and 76% localization root-mean-squared error (RMSE) reduction in 2D and 3D experiments, respectively, when compared against trivial placements.
UTIL: An Ultra-wideband Time-difference-of-arrival Indoor Localization Dataset
Mar 28, 2022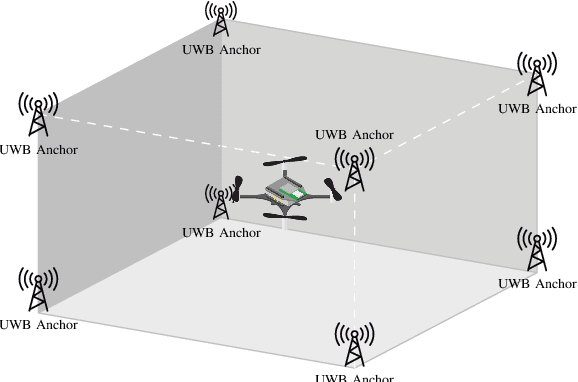
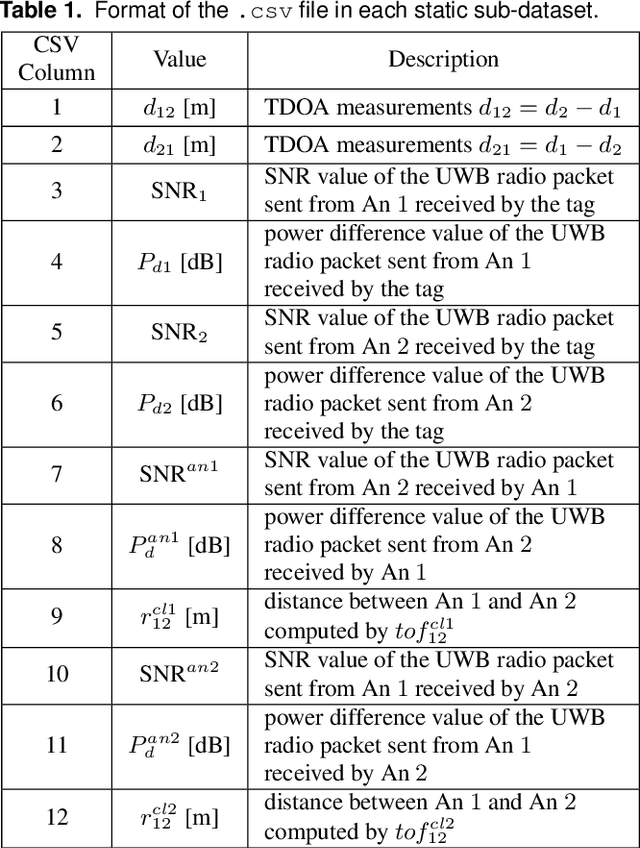


This paper presents an ultra-wideband (UWB) time-difference-of-arrival (TDOA) dataset collected from a quadrotor for research purposes. The dataset consists of low-level signal information from static experiments and UWB TDOA measurements and additional onboard sensor data from flight experiments on a quadrotor. The data collection process is discussed in detail, including the equipment used, measurement collection procedure, and the calibration of the quadrotor platform. All the data is made available as plain text files and we provide both Matlab and Python scripts to parse and analyze the data. We provide a thorough description of the data format and some pointers on the potential usage of each sub-dataset. The dataset is available for download at https://utiasdsl.github.io/util-uwb-dataset/. We hope this dataset will help researchers develop and compare reliable estimation methods for the emerging UWB TDOA-based indoor localization technology.
Online Spatio-temporal Calibration of Tightly-coupled Ultrawideband-aided Inertial Localization
Jul 31, 2021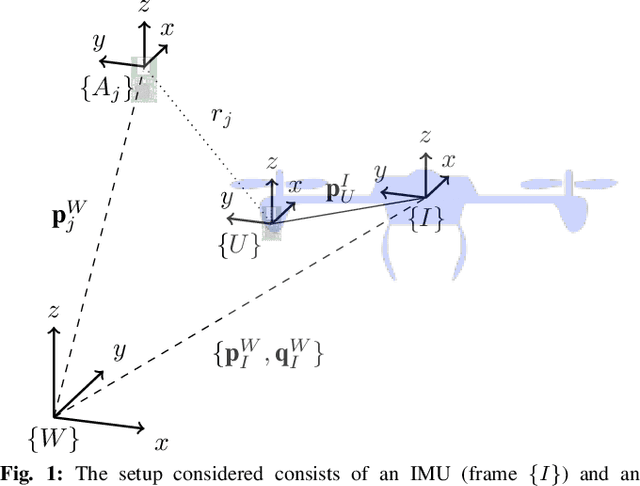



The combination of ultrawideband (UWB) radios and inertial measurement units (IMU) can provide accurate positioning in environments where the Global Positioning System (GPS) service is either unavailable or has unsatisfactory performance. The two sensors, IMU and UWB radio, are often not co-located on a moving system. The UWB radio is typically located at the extremities of the system to ensure reliable communication, whereas the IMUs are located closer to its center of gravity. Furthermore, without hardware or software synchronization, data from heterogeneous sensors can arrive at different time instants resulting in temporal offsets. If uncalibrated, these spatial and temporal offsets can degrade the positioning performance. In this paper, using observability and identifiability criteria, we derive the conditions required for successfully calibrating the spatial and the temporal offset parameters of a tightly-coupled UWB-IMU system. We also present an online method for jointly calibrating these offsets. The results show that our calibration approach results in improved positioning accuracy while simultaneously estimating (i) the spatial offset parameters to millimeter precision and (ii) the temporal offset parameter to millisecond precision.
On Observability and Identifiability of Tightly-coupled Ultrawideband-aided Inertial Localization
Jul 29, 2021
The combination of ultrawideband (UWB) radios and inertial measurement units (IMU) can provide accurate positioning. To ensure reliable communication, the radios are generally mounted at the extremities of a mobile system whereas the IMUs are located closer to the center of gravity for use in control, resulting in a spatial offset between the IMU and the UWB radio. Additionally, data from heterogeneous sensors can arrive at different time instants. The systematic fusion of data from multiple sources requires the temporal offset and spatial offset between the sensors to be known. An important aspect of calibration is the observability of the system state and identifiability of the system parameters. Estimating the state or parameters of a system that is otherwise unobservable or unidentifiable, can result in poor estimates. In this report, the local weak observability of the state and the identifiability of the temporal offset for a tightly-coupled UWB-aided inertial localization system is studied.