 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Spatio-temporal Calibration of Tightly-coupled Ultrawideband-aided Inertial Localization
Paper and Code
Jul 31, 2021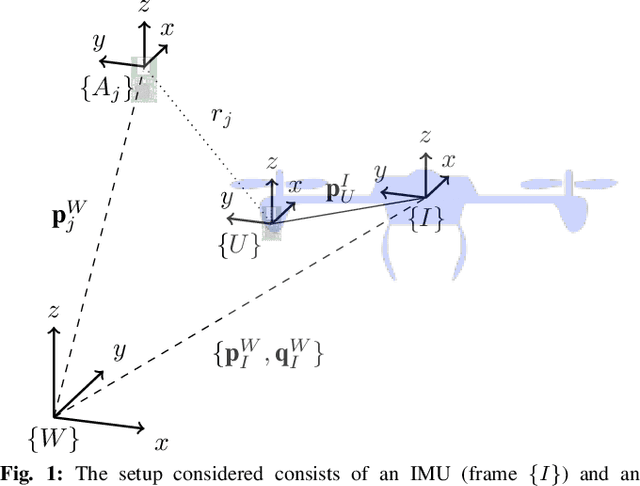



The combination of ultrawideband (UWB) radios and inertial measurement units (IMU) can provide accurate positioning in environments where the Global Positioning System (GPS) service is either unavailable or has unsatisfactory performance. The two sensors, IMU and UWB radio, are often not co-located on a moving system. The UWB radio is typically located at the extremities of the system to ensure reliable communication, whereas the IMUs are located closer to its center of gravity. Furthermore, without hardware or software synchronization, data from heterogeneous sensors can arrive at different time instants resulting in temporal offsets. If uncalibrated, these spatial and temporal offsets can degrade the positioning performance. In this paper, using observability and identifiability criteria, we derive the conditions required for successfully calibrating the spatial and the temporal offset parameters of a tightly-coupled UWB-IMU system. We also present an online method for jointly calibrating these offsets. The results show that our calibration approach results in improved positioning accuracy while simultaneously estimating (i) the spatial offset parameters to millimeter precision and (ii) the temporal offset parameter to millisecond precision.