 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-Aware Time-Optimal Planning for Quadrotor Waypoint Flight
Mar 04, 2026Agile quadrotor flight pushes the limits of control, actuation, and onboard perception. While time-optimal trajectory planning has been extensively studied, existing approaches typically neglect the tight coupling between vehicle dynamics, environmental geometry, and the visual requirements of onboard state estimation. As a result, trajectories that are dynamically feasible may fail in closed-loop execution due to degraded visual quality. This paper introduces a unified time-optimal trajectory optimization framework for vision-based quadrotors that explicitly incorporates perception constraints alongside full nonlinear dynamics, rotor actuation limits, aerodynamic effects, camera field-of-view constraints, and convex geometric gate representations. The proposed formulation solves minimum-time lap trajectories for arbitrary racetracks with diverse gate shapes and orientations, while remaining numerically robust and computationally efficient. We derive an information-theoretic position uncertainty metric to quantify visual state-estimation quality and integrate it into the planner through three perception objectives: position uncertainty minimization, sequential field-of-view constraints, and look-ahead alignment. This enables systematic exploration of the trade-offs between speed and perceptual reliability. To accurately track the resulting perception-aware trajectories, we develop a model predictive contouring tracking controller that separates lateral and progress errors. Experiments demonstrate real-world flight speeds up to 9.8 m/s with 0.07 m average tracking error, and closed-loop success rates improved from 55% to 100% on a challenging Split-S course. The proposed system provides a scalable benchmark for studying the fundamental limits of perception-aware, time-optimal autonomous flight.
Revisiting Global Token Mixing in Task-Dependent MRI Restoration: Insights from Minimal Gated CNN Baselines
Mar 02, 2026Global token mixing, implemented via self-attention or state-space sequence models, has become a popular model design choice for MRI restoration. However, MRI restoration tasks differ substantially in how their degradations vary over image and k-space domains, and in the degree to which global coupling is already imposed by physics-driven data consistency terms. In this work, we ask the question whether global token mixing is actually beneficial in each individual task across three representative settings: accelerated MRI reconstruction with explicit data consistency, MRI super-resolution with k-space center cropping, and denoising of clinical carotid MRI data with spatially heteroscedastic noise. To reduce confounding factors, we establish a controlled testbed comparing a minimal local gated CNN and its large-field variant, benchmarking them directly against state-of-the-art global models under aligned training and evaluation protocols. For accelerated MRI reconstruction, the minimal unrolled gated-CNN baseline is already highly competitive compared to recent token-mixing approaches in public reconstruction benchmarks, suggesting limited additional benefits when the forward model and data-consistency steps provide strong global constraints. For super-resolution, where low-frequency k-space data are largely preserved by the controlled low-pass degradation, local gated models remain competitive, and a lightweight large-field variant yields only modest improvements. In contrast, for denoising with pronounced spatially heteroscedastic noise, token-mixing models achieve the strongest overall performance, consistent with the need to estimate spatially varying reliability. In conclusion, our results demonstrate that the utility of global token mixing in MRI restoration is task-dependent, and it should be tailored to the underlying imaging physics and degradation structure.
Unifying Quadrotor Motion Planning and Control by Chaining Different Fidelity Models
Dec 13, 2025Many aerial tasks involving quadrotors demand both instant reactivity and long-horizon planning. High-fidelity models enable accurate control but are too slow for long horizons; low-fidelity planners scale but degrade closed-loop performance. We present Unique, a unified MPC that cascades models of different fidelity within a single optimization: a short-horizon, high-fidelity model for accurate control, and a long-horizon, low-fidelity model for planning. We align costs across horizons, derive feasibility-preserving thrust and body-rate constraints for the point-mass model, and introduce transition constraints that match the different states, thrust-induced acceleration, and jerk-body-rate relations. To prevent local minima emerging from nonsmooth clutter, we propose a 3D progressive smoothing schedule that morphs norm-based obstacles along the horizon. In addition, we deploy parallel randomly initialized MPC solvers to discover lower-cost local minima on the long, low-fidelity horizon. In simulation and real flights, under equal computational budgets, Unique improves closed-loop position or velocity tracking by up to 75% compared with standard MPC and hierarchical planner-tracker baselines. Ablations and Pareto analyses confirm robust gains across horizon variations, constraint approximations, and smoothing schedules.
Agentic Aerial Cinematography: From Dialogue Cues to Cinematic Trajectories
Sep 19, 2025We present Agentic Aerial Cinematography: From Dialogue Cues to Cinematic Trajectories (ACDC), an autonomous drone cinematography system driven by natural language communication between human directors and drones. The main limitation of previous drone cinematography workflows is that they require manual selection of waypoints and view angles based on predefined human intent, which is labor-intensive and yields inconsistent performance. In this paper, we propose employing large language models (LLMs) and vision foundation models (VFMs) to convert free-form natural language prompts directly into executable indoor UAV video tours. Specifically, our method comprises a vision-language retrieval pipeline for initial waypoint selection, a preference-based Bayesian optimization framework that refines poses using aesthetic feedback, and a motion planner that generates safe quadrotor trajectories. We validate ACDC through both simulation and hardware-in-the-loop experiments, demonstrating that it robustly produces professional-quality footage across diverse indoor scenes without requiring expertise in robotics or cinematography. These results highlight the potential of embodied AI agents to close the loop from open-vocabulary dialogue to real-world autonomous aerial cinematography.
Admissibility of Completely Randomized Trials: A Large-Deviation Approach
Jun 05, 2025When an experimenter has the option of running an adaptive trial, is it admissible to ignore this option and run a non-adaptive trial instead? We provide a negative answer to this question in the best-arm identification problem, where the experimenter aims to allocate measurement efforts judiciously to confidently deploy the most effective treatment arm. We find that, whenever there are at least three treatment arms, there exist simple adaptive designs that universally and strictly dominate non-adaptive completely randomized trials. This dominance is characterized by a notion called efficiency exponent, which quantifies a design's statistical efficiency when the experimental sample is large. Our analysis focuses on the class of batched arm elimination designs, which progressively eliminate underperforming arms at pre-specified batch intervals. We characterize simple sufficient conditions under which these designs universally and strictly dominate completely randomized trials. These results resolve the second open problem posed in Qin [2022].
All Languages Matter: Evaluating LMMs on Culturally Diverse 100 Languages
Nov 25, 2024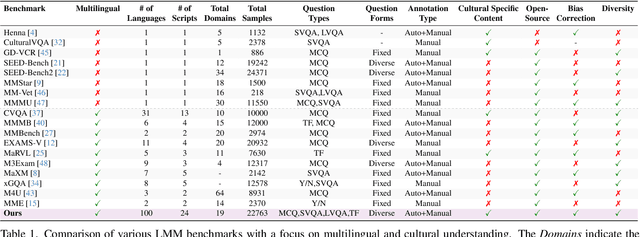
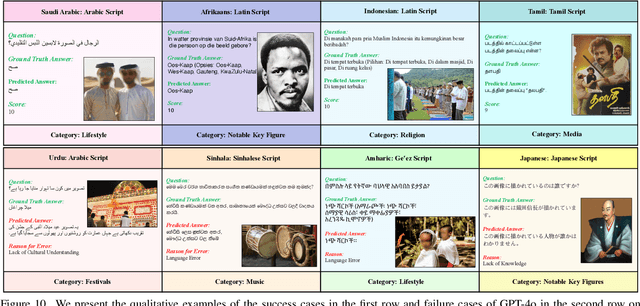
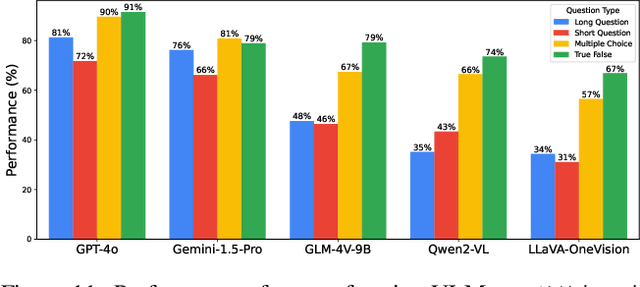
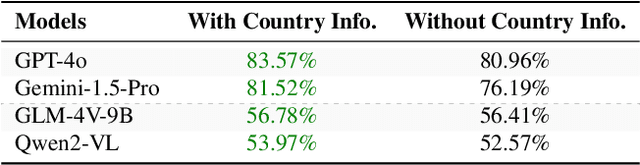
Existing Large Multimodal Models (LMMs) generally focus on only a few regions and languages. As LMMs continue to improve, it is increasingly important to ensure they understand cultural contexts, respect local sensitivities, and support low-resource languages, all while effectively integrating corresponding visual cues. In pursuit of culturally diverse global multimodal models, our proposed All Languages Matter Benchmark (ALM-bench) represents the largest and most comprehensive effort to date for evaluating LMMs across 100 languages. ALM-bench challenges existing models by testing their ability to understand and reason about culturally diverse images paired with text in various languages, including many low-resource languages traditionally underrepresented in LMM research. The benchmark offers a robust and nuanced evaluation framework featuring various question formats, including true/false, multiple choice, and open-ended questions, which are further divided into short and long-answer categories. ALM-bench design ensures a comprehensive assessment of a model's ability to handle varied levels of difficulty in visual and linguistic reasoning. To capture the rich tapestry of global cultures, ALM-bench carefully curates content from 13 distinct cultural aspects, ranging from traditions and rituals to famous personalities and celebrations. Through this, ALM-bench not only provides a rigorous testing ground for state-of-the-art open and closed-source LMMs but also highlights the importance of cultural and linguistic inclusivity, encouraging the development of models that can serve diverse global populations effectively. Our benchmark is publicly available.
DB-SAM: Delving into High Quality Universal Medical Image Segmentation
Oct 05, 2024Recently, the Segment Anything Model (SAM) has demonstrated promising segmentation capabilities in a variety of downstream segmentation tasks. However in the context of universal medical image segmentation there exists a notable performance discrepancy when directly applying SAM due to the domain gap between natural and 2D/3D medical data. In this work, we propose a dual-branch adapted SAM framework, named DB-SAM, that strives to effectively bridge this domain gap. Our dual-branch adapted SAM contains two branches in parallel: a ViT branch and a convolution branch. The ViT branch incorporates a learnable channel attention block after each frozen attention block, which captures domain-specific local features. On the other hand, the convolution branch employs a light-weight convolutional block to extract domain-specific shallow features from the input medical image. To perform cross-branch feature fusion, we design a bilateral cross-attention block and a ViT convolution fusion block, which dynamically combine diverse information of two branches for mask decoder. Extensive experiments on large-scale medical image dataset with various 3D and 2D medical segmentation tasks reveal the merits of our proposed contributions. On 21 3D medical image segmentation tasks, our proposed DB-SAM achieves an absolute gain of 8.8%, compared to a recent medical SAM adapter in the literature. The code and model are available at https://github.com/AlfredQin/DB-SAM.
Time-Optimal Planning for Long-Range Quadrotor Flights: An Automatic Optimal Synthesis Approach
Jul 25, 2024Time-critical tasks such as drone racing typically cover large operation areas. However, it is difficult and computationally intensive for current time-optimal motion planners to accommodate long flight distances since a large yet unknown number of knot points is required to represent the trajectory. We present a polynomial-based automatic optimal synthesis (AOS) approach that can address this challenge. Our method not only achieves superior time optimality but also maintains a consistently low computational cost across different ranges while considering the full quadrotor dynamics. First, we analyze the properties of time-optimal quadrotor maneuvers to determine the minimal number of polynomial pieces required to capture the dominant structure of time-optimal trajectories. This enables us to represent substantially long minimum-time trajectories with a minimal set of variables. Then, a robust optimization scheme is developed to handle arbitrary start and end conditions as well as intermediate waypoints. Extensive comparisons show that our approach is faster than the state-of-the-art approach by orders of magnitude with comparable time optimality. Real-world experiments further validate the quality of the resulting trajectories, demonstrating aggressive time-optimal maneuvers with a peak velocity of 8.86 m/s.
Optimizing Adaptive Experiments: A Unified Approach to Regret Minimization and Best-Arm Identification
Feb 16, 2024Practitioners conducting adaptive experiments often encounter two competing priorities: reducing the cost of experimentation by effectively assigning treatments during the experiment itself, and gathering information swiftly to conclude the experiment and implement a treatment across the population. Currently, the literature is divided, with studies on regret minimization addressing the former priority in isolation, and research on best-arm identification focusing solely on the latter. This paper proposes a unified model that accounts for both within-experiment performance and post-experiment outcomes. We then provide a sharp theory of optimal performance in large populations that unifies canonical results in the literature. This unification also uncovers novel insights. For example, the theory reveals that familiar algorithms, like the recently proposed top-two Thompson sampling algorithm, can be adapted to optimize a broad class of objectives by simply adjusting a single scalar parameter. In addition, the theory reveals that enormous reductions in experiment duration can sometimes be achieved with minimal impact on both within-experiment and post-experiment regret.
Dual-Directed Algorithm Design for Efficient Pure Exploration
Oct 30, 2023We consider pure-exploration problems in the context of stochastic sequential adaptive experiments with a finite set of alternative options. The goal of the decision-maker is to accurately answer a query question regarding the alternatives with high confidence with minimal measurement efforts. A typical query question is to identify the alternative with the best performance, leading to ranking and selection problems, or best-arm identification in the machine learning literature. We focus on the fixed-precision setting and derive a sufficient condition for optimality in terms of a notion of strong convergence to the optimal allocation of samples. Using dual variables, we characterize the necessary and sufficient conditions for an allocation to be optimal. The use of dual variables allow us to bypass the combinatorial structure of the optimality conditions that relies solely on primal variables. Remarkably, these optimality conditions enable an extension of top-two algorithm design principle, initially proposed for best-arm identification. Furthermore, our optimality conditions give rise to a straightforward yet efficient selection rule, termed information-directed selection, which adaptively picks from a candidate set based on information gain of the candidates. We outline the broad contexts where our algorithmic approach can be implemented. We establish that, paired with information-directed selection, top-two Thompson sampling is (asymptotically) optimal for Gaussian best-arm identification, solving a glaring open problem in the pure exploration literature. Our algorithm is optimal for $\epsilon$-best-arm identification and thresholding bandit problems. Our analysis also leads to a general principle to guide adaptations of Thompson sampling for pure-exploration problems. Numerical experiments highlight the exceptional efficiency of our proposed algorithms relative to existing ones.