 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning Paralinguistic Understanding and Generation in Speech LLMs via Multi-Task Reinforcement Learning
Mar 16, 2026Speech large language models (LLMs) observe paralinguistic cues such as prosody, emotion, and non-verbal sounds--crucial for intent understanding. However, leveraging these cues faces challenges: limited training data, annotation difficulty, and models exploiting lexical shortcuts over paralinguistic signals. We propose multi-task reinforcement learning (RL) with chain-of-thought prompting that elicits explicit affective reasoning. To address data scarcity, we introduce a paralinguistics-aware speech LLM (PALLM) that jointly optimizes sentiment classification from audio and paralinguistics-aware response generation via a two-stage pipeline. Experiments demonstrate that our approach improves paralinguistics understanding over both supervised baselines and strong proprietary models (Gemini-2.5-Pro, GPT-4o-audio) by 8-12% on Expresso, IEMOCAP, and RAVDESS. The results show that modeling paralinguistic reasoning with multi-task RL is crucial for building emotionally intelligent speech LLMs.
The Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Time-Optimal Planning for Long-Range Quadrotor Flights: An Automatic Optimal Synthesis Approach
Jul 25, 2024Time-critical tasks such as drone racing typically cover large operation areas. However, it is difficult and computationally intensive for current time-optimal motion planners to accommodate long flight distances since a large yet unknown number of knot points is required to represent the trajectory. We present a polynomial-based automatic optimal synthesis (AOS) approach that can address this challenge. Our method not only achieves superior time optimality but also maintains a consistently low computational cost across different ranges while considering the full quadrotor dynamics. First, we analyze the properties of time-optimal quadrotor maneuvers to determine the minimal number of polynomial pieces required to capture the dominant structure of time-optimal trajectories. This enables us to represent substantially long minimum-time trajectories with a minimal set of variables. Then, a robust optimization scheme is developed to handle arbitrary start and end conditions as well as intermediate waypoints. Extensive comparisons show that our approach is faster than the state-of-the-art approach by orders of magnitude with comparable time optimality. Real-world experiments further validate the quality of the resulting trajectories, demonstrating aggressive time-optimal maneuvers with a peak velocity of 8.86 m/s.
Time-Optimal Gate-Traversing Planner for Autonomous Drone Racing
Sep 16, 2023In drone racing, the time-minimum trajectory is affected by the drone's capabilities, the layout of the race track, and the configurations of the gates (e.g., their shapes and sizes). However, previous studies neglect the configuration of the gates, simply rendering drone racing a waypoint-passing task. This formulation often leads to a conservative choice of paths through the gates, as the spatial potential of the gates is not fully utilized. To address this issue, we present a time-optimal planner that can faithfully model gate constraints with various configurations and thereby generate a more time-efficient trajectory while considering the single-rotor-thrust limits. Our approach excels in computational efficiency which only takes a few seconds to compute the full state and control trajectories of the drone through tracks with dozens of different gates. Extensive simulations and experiments confirm the effectiveness of the proposed methodology, showing that the lap time can be further reduced by taking into account the gate's configuration. We validate our planner in real-world flights and demonstrate super-extreme flight trajectory through race tracks.
Scalable Temporal Localization of Sensitive Activities in Movies and TV Episodes
Jun 16, 2022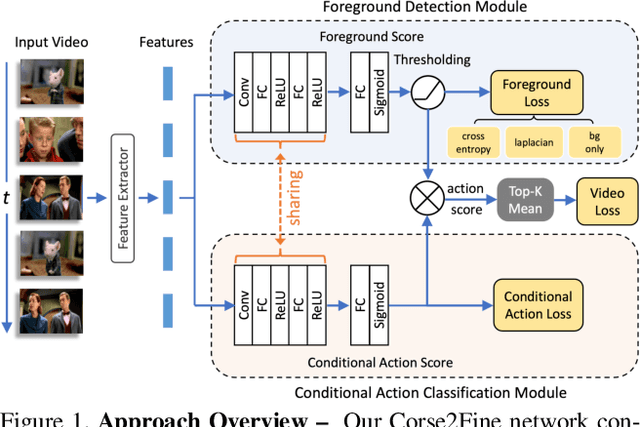
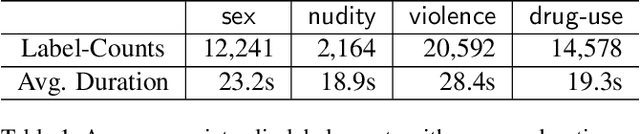


To help customers make better-informed viewing choices, video-streaming services try to moderate their content and provide more visibility into which portions of their movies and TV episodes contain age-appropriate material (e.g., nudity, sex, violence, or drug-use). Supervised models to localize these sensitive activities require large amounts of clip-level labeled data which is hard to obtain, while weakly-supervised models to this end usually do not offer competitive accuracy. To address this challenge, we propose a novel Coarse2Fine network designed to make use of readily obtainable video-level weak labels in conjunction with sparse clip-level labels of age-appropriate activities. Our model aggregates frame-level predictions to make video-level classifications and is therefore able to leverage sparse clip-level labels along with video-level labels. Furthermore, by performing frame-level predictions in a hierarchical manner, our approach is able to overcome the label-imbalance problem caused due to the rare-occurrence nature of age-appropriate content. We present comparative results of our approach using 41,234 movies and TV episodes (~3 years of video-content) from 521 sub-genres and 250 countries making it by far the largest-scale empirical analysis of age-appropriate activity localization in long-form videos ever published. Our approach offers 107.2% relative mAP improvement (from 5.5% to 11.4%) over existing state-of-the-art activity-localization approaches.
High dimensional precision medicine from patient-derived xenografts
Dec 13, 2019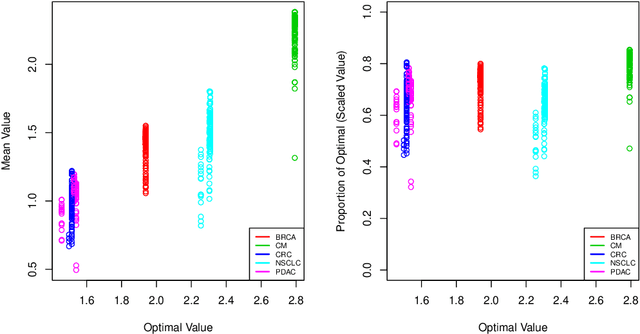

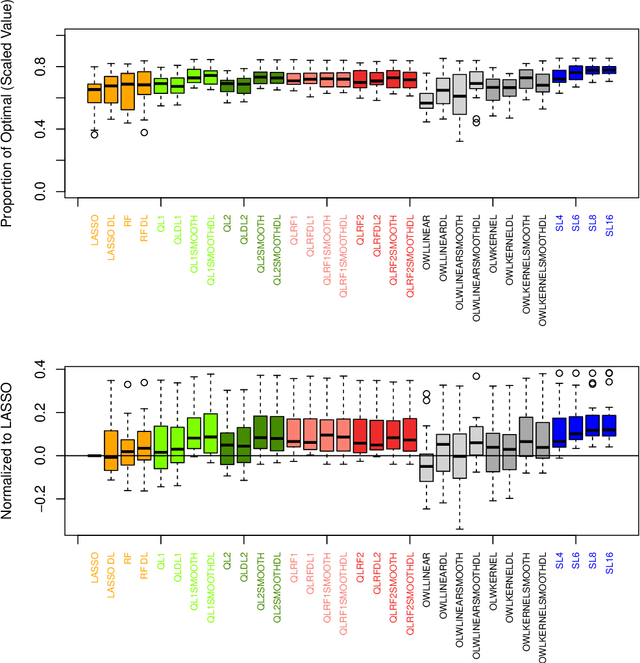
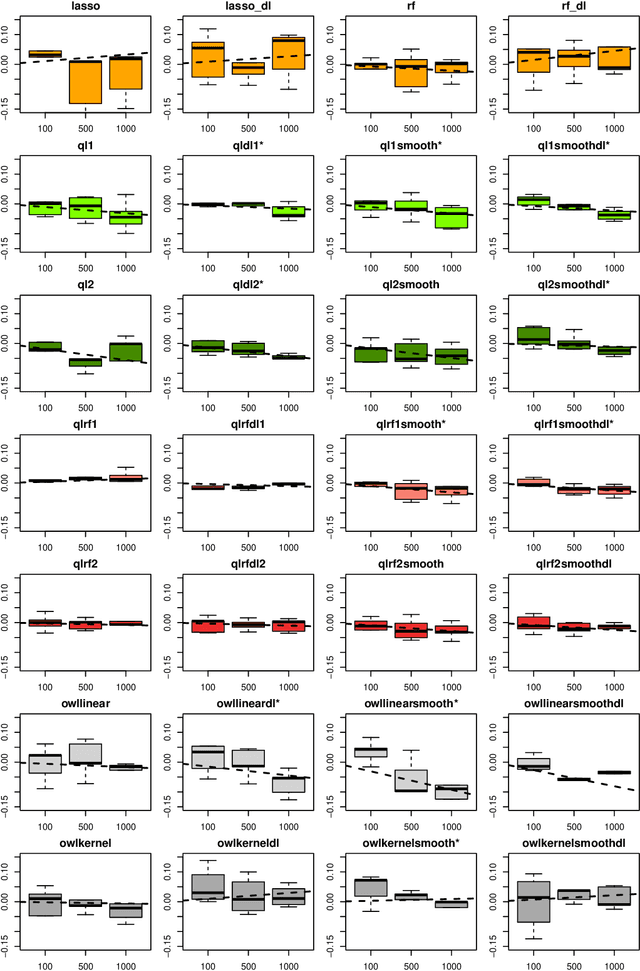
The complexity of human cancer often results in significant heterogeneity in response to treatment. Precision medicine offers potential to improve patient outcomes by leveraging this heterogeneity. Individualized treatment rules (ITRs) formalize precision medicine as maps from the patient covariate space into the space of allowable treatments. The optimal ITR is that which maximizes the mean of a clinical outcome in a population of interest. Patient-derived xenograft (PDX) studies permit the evaluation of multiple treatments within a single tumor and thus are ideally suited for estimating optimal ITRs. PDX data are characterized by correlated outcomes, a high-dimensional feature space, and a large number of treatments. Existing methods for estimating optimal ITRs do not take advantage of the unique structure of PDX data or handle the associated challenges well. In this paper, we explore machine learning methods for estimating optimal ITRs from PDX data. We analyze data from a large PDX study to identify biomarkers that are informative for developing personalized treatment recommendations in multiple cancers. We estimate optimal ITRs using regression-based approaches such as Q-learning and direct search methods such as outcome weighted learning. Finally, we implement a superlearner approach to combine a set of estimated ITRs and show that the resulting ITR performs better than any of the input ITRs, mitigating uncertainty regarding user choice of any particular ITR estimation methodology. Our results indicate that PDX data are a valuable resource for developing individualized treatment strategies in oncology.