 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Task Model Predictive Control for Sequential Mobile Manipulation Tasks
Mar 10, 2026Mobile manipulators are envisioned to serve more complex roles in people's everyday lives. With recent breakthroughs in large language models, task planners have become better at translating human verbal instructions into a sequence of tasks. However, there is still a need for a decision-making algorithm that can seamlessly interface with the high-level task planner to carry out the sequence of tasks efficiently. In this work, building on the idea of nonlinear lexicographic optimization, we propose a novel Hierarchical-Task Model Predictive Control framework that is able to complete sequential tasks with improved performance and reactivity by effectively leveraging the robot's redundancy. Compared to the state-of-the-art task-prioritized inverse kinematic control method, our approach has improved hierarchical trajectory tracking performance by 42% on average when facing task changes, robot singularity and reference variations. Compared to a typical single-task architecture, our proposed hierarchical task control architecture enables the robot to traverse a shorter path in task space and achieves an execution time 2.3 times faster when executing a sequence of delivery tasks. We demonstrated the results with real-world experiments on a 9 degrees of freedom mobile manipulator.
Perceptive Hierarchical-Task MPC for Sequential Mobile Manipulation in Unstructured Semi-Static Environments
Mar 10, 2026As compared to typical mobile manipulation tasks, sequential mobile manipulation poses a unique challenge -- as the robot operates over extended periods, successful task completion is not solely dependent on consistent motion generation but also on the robot's awareness and adaptivity to changes in the operating environment. While existing motion planners can generate whole-body trajectories to complete sequential tasks, they typically assume that the environment remains static and rely on precomputed maps. This assumption often breaks down during long-term operations, where semi-static changes such as object removal, introduction, or shifts are common. In this work, we propose a novel perceptive hierarchical-task model predictive control (HTMPC) framework for efficient sequential mobile manipulation in unstructured, changing environments. To tackle the challenge, we leverage a Bayesian inference framework to explicitly model object-level changes and thereby maintain a temporally accurate representation of the 3D environment; this up-to-date representation is embedded in a lexicographic optimization framework to enable efficient execution of sequential tasks. We validate our perceptive HTMPC approach through both simulated and real-robot experiments. In contrast to baseline methods, our approach systematically accounts for moved and phantom obstacles, successfully completing sequential tasks with higher efficiency and reactivity, without relying on prior maps or external infrastructure.
SQ-CBF: Signed Distance Functions for Numerically Stable Superquadric-Based Safety Filtering
Feb 11, 2026Ensuring safe robot operation in cluttered and dynamic environments remains a fundamental challenge. While control barrier functions provide an effective framework for real-time safety filtering, their performance critically depends on the underlying geometric representation, which is often simplified, leading to either overly conservative behavior or insufficient collision coverage. Superquadrics offer an expressive way to model complex shapes using a few primitives and are increasingly used for robot safety. To integrate this representation into collision avoidance, most existing approaches directly use their implicit functions as barrier candidates. However, we identify a critical but overlooked issue in this practice: the gradients of the implicit SQ function can become severely ill-conditioned, potentially rendering the optimization infeasible and undermining reliable real-time safety filtering. To address this issue, we formulate an SQ-based safety filtering framework that uses signed distance functions as barrier candidates. Since analytical SDFs are unavailable for general SQs, we compute distances using the efficient Gilbert-Johnson-Keerthi algorithm and obtain gradients via randomized smoothing. Extensive simulation and real-world experiments demonstrate consistent collision-free manipulation in cluttered and unstructured scenes, showing robustness to challenging geometries, sensing noise, and dynamic disturbances, while improving task efficiency in teleoperation tasks. These results highlight a pathway toward safety filters that remain precise and reliable under the geometric complexity of real-world environments.
Addressing Relative Degree Issues in Control Barrier Function Synthesis with Physics-Informed Neural Networks
Apr 08, 2025



In robotics, control barrier function (CBF)-based safety filters are commonly used to enforce state constraints. A critical challenge arises when the relative degree of the CBF varies across the state space. This variability can create regions within the safe set where the control input becomes unconstrained. When implemented as a safety filter, this may result in chattering near the safety boundary and ultimately compromise system safety. To address this issue, we propose a novel approach for CBF synthesis by formulating it as solving a set of boundary value problems. The solutions to the boundary value problems are determined using physics-informed neural networks (PINNs). Our approach ensures that the synthesized CBFs maintain a constant relative degree across the set of admissible states, thereby preventing unconstrained control scenarios. We illustrate the approach in simulation and further verify it through real-world quadrotor experiments, demonstrating its effectiveness in preserving desired system safety properties.
SwarmGPT-Primitive: A Language-Driven Choreographer for Drone Swarms Using Safe Motion Primitive Composition
Dec 11, 2024Catalyzed by advancements in hardware and software, drone performances are increasingly making their mark in the entertainment industry. However, designing smooth and safe choreographies for drone swarms is complex and often requires expert domain knowledge. In this work, we introduce SwarmGPT-Primitive, a language-based choreographer that integrates the reasoning capabilities of large language models (LLMs) with safe motion planning to facilitate deployable drone swarm choreographies. The LLM composes choreographies for a given piece of music by utilizing a library of motion primitives; the language-based choreographer is augmented with an optimization-based safety filter, which certifies the choreography for real-world deployment by making minimal adjustments when feasibility and safety constraints are violated. The overall SwarmGPT-Primitive framework decouples choreographic design from safe motion planning, which allows non-expert users to re-prompt and refine compositions without concerns about compliance with constraints such as avoiding collisions or downwash effects or satisfying actuation limits. We demonstrate our approach through simulations and experiments with swarms of up to 20 drones performing choreographies designed based on various songs, highlighting the system's ability to generate effective and synchronized drone choreographies for real-world deployment.
Semantically Safe Robot Manipulation: From Semantic Scene Understanding to Motion Safeguards
Oct 19, 2024



Ensuring safe interactions in human-centric environments requires robots to understand and adhere to constraints recognized by humans as "common sense" (e.g., "moving a cup of water above a laptop is unsafe as the water may spill" or "rotating a cup of water is unsafe as it can lead to pouring its content"). Recent advances in computer vision and machine learning have enabled robots to acquire a semantic understanding of and reason about their operating environments. While extensive literature on safe robot decision-making exists, semantic understanding is rarely integrated into these formulations. In this work, we propose a semantic safety filter framework to certify robot inputs with respect to semantically defined constraints (e.g., unsafe spatial relationships, behaviours, and poses) and geometrically defined constraints (e.g., environment-collision and self-collision constraints). In our proposed approach, given perception inputs, we build a semantic map of the 3D environment and leverage the contextual reasoning capabilities of large language models to infer semantically unsafe conditions. These semantically unsafe conditions are then mapped to safe actions through a control barrier certification formulation. We evaluated our semantic safety filter approach in teleoperated tabletop manipulation tasks and pick-and-place tasks, demonstrating its effectiveness in incorporating semantic constraints to ensure safe robot operation beyond collision avoidance.
Closing the Perception-Action Loop for Semantically Safe Navigation in Semi-Static Environments
Apr 22, 2024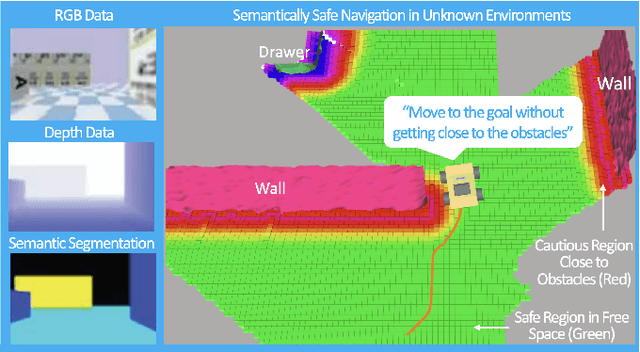
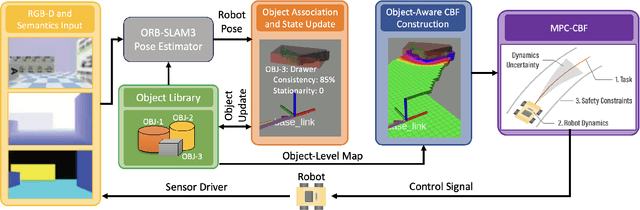
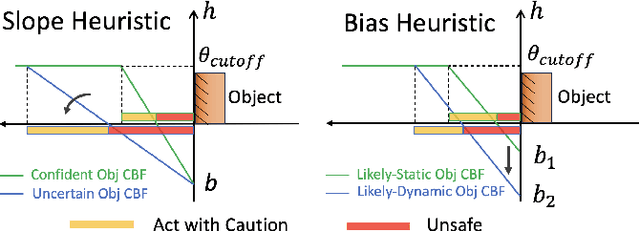
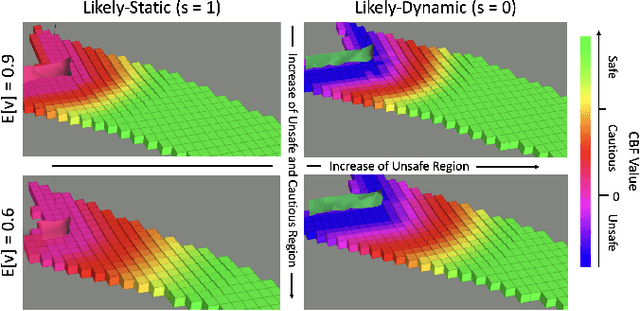
Autonomous robots navigating in changing environments demand adaptive navigation strategies for safe long-term operation. While many modern control paradigms offer theoretical guarantees, they often assume known extrinsic safety constraints, overlooking challenges when deployed in real-world environments where objects can appear, disappear, and shift over time. In this paper, we present a closed-loop perception-action pipeline that bridges this gap. Our system encodes an online-constructed dense map, along with object-level semantic and consistency estimates into a control barrier function (CBF) to regulate safe regions in the scene. A model predictive controller (MPC) leverages the CBF-based safety constraints to adapt its navigation behaviour, which is particularly crucial when potential scene changes occur. We test the system in simulations and real-world experiments to demonstrate the impact of semantic information and scene change handling on robot behavior, validating the practicality of our approach.
Is Data All That Matters? The Role of Control Frequency for Learning-Based Sampled-Data Control of Uncertain Systems
Mar 14, 2024Learning models or control policies from data has become a powerful tool to improve the performance of uncertain systems. While a strong focus has been placed on increasing the amount and quality of data to improve performance, data can never fully eliminate uncertainty, making feedback necessary to ensure stability and performance. We show that the control frequency at which the input is recalculated is a crucial design parameter, yet it has hardly been considered before. We address this gap by combining probabilistic model learning and sampled-data control. We use Gaussian processes (GPs) to learn a continuous-time model and compute a corresponding discrete-time controller. The result is an uncertain sampled-data control system, for which we derive robust stability conditions. We formulate semidefinite programs to compute the minimum control frequency required for stability and to optimize performance. As a result, our approach enables us to study the effect of both control frequency and data on stability and closed-loop performance. We show in numerical simulations of a quadrotor that performance can be improved by increasing either the amount of data or the control frequency, and that we can trade off one for the other. For example, by increasing the control frequency by 33%, we can reduce the number of data points by half while still achieving similar performance.
Control-Barrier-Aided Teleoperation with Visual-Inertial SLAM for Safe MAV Navigation in Complex Environments
Mar 07, 2024



In this paper, we consider a Micro Aerial Vehicle (MAV) system teleoperated by a non-expert and introduce a perceptive safety filter that leverages Control Barrier Functions (CBFs) in conjunction with Visual-Inertial Simultaneous Localization and Mapping (VI-SLAM) and dense 3D occupancy mapping to guarantee safe navigation in complex and unstructured environments. Our system relies solely on onboard IMU measurements, stereo infrared images, and depth images and autonomously corrects teleoperated inputs when they are deemed unsafe. We define a point in 3D space as unsafe if it satisfies either of two conditions: (i) it is occupied by an obstacle, or (ii) it remains unmapped. At each time step, an occupancy map of the environment is updated by the VI-SLAM by fusing the onboard measurements, and a CBF is constructed to parameterize the (un)safe region in the 3D space. Given the CBF and state feedback from the VI-SLAM module, a safety filter computes a certified reference that best matches the teleoperation input while satisfying the safety constraint encoded by the CBF. In contrast to existing perception-based safe control frameworks, we directly close the perception-action loop and demonstrate the full capability of safe control in combination with real-time VI-SLAM without any external infrastructure or prior knowledge of the environment. We verify the efficacy of the perceptive safety filter in real-time MAV experiments using exclusively onboard sensing and computation and show that the teleoperated MAV is able to safely navigate through unknown environments despite arbitrary inputs sent by the teleoperator.
An EnKF-LSTM Assimilation Algorithm for Crop Growth Model
Mar 06, 2024



Accurate and timely prediction of crop growth is of great significance to ensure crop yields and researchers have developed several crop models for the prediction of crop growth. However, there are large difference between the simulation results obtained by the crop models and the actual results, thus in this paper, we proposed to combine the simulation results with the collected crop data for data assimilation so that the accuracy of prediction will be improved. In this paper, an EnKF-LSTM data assimilation method for various crops is proposed by combining ensemble Kalman filter and LSTM neural network, which effectively avoids the overfitting problem of existing data assimilation methods and eliminates the uncertainty of the measured data. The verification of the proposed EnKF-LSTM method and the comparison of the proposed method with other data assimilation methods were performed using datasets collected by sensor equipment deployed on a farm.