 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLARE: Continual Learning for Vision-Language-Action Models via Autonomous Adapter Routing and Expansion
Jan 14, 2026To teach robots complex manipulation tasks, it is now a common practice to fine-tune a pre-trained vision-language-action model (VLA) on task-specific data. However, since this recipe updates existing representations, it is unsuitable for long-term operation in the real world, where robots must continually adapt to new tasks and environments while retaining the knowledge they have already acquired. Existing continual learning methods for robotics commonly require storing previous data (exemplars), struggle with long task sequences, or rely on task identifiers for deployment. To address these limitations, we propose CLARE, a general, parameter-efficient framework for exemplar-free continual learning with VLAs. CLARE introduces lightweight modular adapters into selected feedforward layers and autonomously expands the model only where necessary when learning a new task, guided by layer-wise feature similarity. During deployment, an autoencoder-based routing mechanism dynamically activates the most relevant adapters without requiring task labels. Through extensive experiments on the LIBERO benchmark, we show that CLARE achieves high performance on new tasks without catastrophic forgetting of earlier tasks, significantly outperforming even exemplar-based methods. Code and data are available at https://tum-lsy.github.io/clare.
From Demonstrations to Safe Deployment: Path-Consistent Safety Filtering for Diffusion Policies
Nov 09, 2025Diffusion policies (DPs) achieve state-of-the-art performance on complex manipulation tasks by learning from large-scale demonstration datasets, often spanning multiple embodiments and environments. However, they cannot guarantee safe behavior, so external safety mechanisms are needed. These, however, alter actions in ways unseen during training, causing unpredictable behavior and performance degradation. To address these problems, we propose path-consistent safety filtering (PACS) for DPs. Our approach performs path-consistent braking on a trajectory computed from the sequence of generated actions. In this way, we keep execution consistent with the policy's training distribution, maintaining the learned, task-completing behavior. To enable a real-time deployment and handle uncertainties, we verify safety using set-based reachability analysis. Our experimental evaluation in simulation and on three challenging real-world human-robot interaction tasks shows that PACS (a) provides formal safety guarantees in dynamic environments, (b) preserves task success rates, and (c) outperforms reactive safety approaches, such as control barrier functions, by up to 68% in terms of task success. Videos are available at our project website: https://tum-lsy.github.io/pacs/.
Failure Prediction at Runtime for Generative Robot Policies
Oct 10, 2025Imitation learning (IL) with generative models, such as diffusion and flow matching, has enabled robots to perform complex, long-horizon tasks. However, distribution shifts from unseen environments or compounding action errors can still cause unpredictable and unsafe behavior, leading to task failure. Early failure prediction during runtime is therefore essential for deploying robots in human-centered and safety-critical environments. We propose FIPER, a general framework for Failure Prediction at Runtime for generative IL policies that does not require failure data. FIPER identifies two key indicators of impending failure: (i) out-of-distribution (OOD) observations detected via random network distillation in the policy's embedding space, and (ii) high uncertainty in generated actions measured by a novel action-chunk entropy score. Both failure prediction scores are calibrated using a small set of successful rollouts via conformal prediction. A failure alarm is triggered when both indicators, aggregated over short time windows, exceed their thresholds. We evaluate FIPER across five simulation and real-world environments involving diverse failure modes. Our results demonstrate that FIPER better distinguishes actual failures from benign OOD situations and predicts failures more accurately and earlier than existing methods. We thus consider this work an important step towards more interpretable and safer generative robot policies. Code, data and videos are available at https://tum-lsy.github.io/fiper_website.
Diffusion Predictive Control with Constraints
Dec 12, 2024Diffusion models have recently gained popularity for policy learning in robotics due to their ability to capture high-dimensional and multimodal distributions. However, diffusion policies are inherently stochastic and typically trained offline, limiting their ability to handle unseen and dynamic conditions where novel constraints not represented in the training data must be satisfied. To overcome this limitation, we propose diffusion predictive control with constraints (DPCC), an algorithm for diffusion-based control with explicit state and action constraints that can deviate from those in the training data. DPCC uses constraint tightening and incorporates model-based projections into the denoising process of a trained trajectory diffusion model. This allows us to generate constraint-satisfying, dynamically feasible, and goal-reaching trajectories for predictive control. We show through simulations of a robot manipulator that DPCC outperforms existing methods in satisfying novel test-time constraints while maintaining performance on the learned control task.
Flying through Moving Gates without Full State Estimation
Oct 21, 2024Autonomous drone racing requires powerful perception, planning, and control and has become a benchmark and test field for autonomous, agile flight. Existing work usually assumes static race tracks with known maps, which enables offline planning of time-optimal trajectories, performing localization to the gates to reduce the drift in visual-inertial odometry (VIO) for state estimation or training learning-based methods for the particular race track and operating environment. In contrast, many real-world tasks like disaster response or delivery need to be performed in unknown and dynamic environments. To close this gap and make drone racing more robust against unseen environments and moving gates, we propose a control algorithm that does not require a race track map or VIO and uses only monocular measurements of the line of sight (LOS) to the gates. For this purpose, we adopt the law of proportional navigation (PN) to accurately fly through the gates despite gate motions or wind. We formulate the PN-informed vision-based control problem for drone racing as a constrained optimization problem and derive a closed-form optimal solution. We demonstrate through extensive simulations and real-world experiments that our method can navigate through moving gates at high speeds while being robust to different gate movements, model errors, wind, and delays.
Semantically Safe Robot Manipulation: From Semantic Scene Understanding to Motion Safeguards
Oct 19, 2024



Ensuring safe interactions in human-centric environments requires robots to understand and adhere to constraints recognized by humans as "common sense" (e.g., "moving a cup of water above a laptop is unsafe as the water may spill" or "rotating a cup of water is unsafe as it can lead to pouring its content"). Recent advances in computer vision and machine learning have enabled robots to acquire a semantic understanding of and reason about their operating environments. While extensive literature on safe robot decision-making exists, semantic understanding is rarely integrated into these formulations. In this work, we propose a semantic safety filter framework to certify robot inputs with respect to semantically defined constraints (e.g., unsafe spatial relationships, behaviours, and poses) and geometrically defined constraints (e.g., environment-collision and self-collision constraints). In our proposed approach, given perception inputs, we build a semantic map of the 3D environment and leverage the contextual reasoning capabilities of large language models to infer semantically unsafe conditions. These semantically unsafe conditions are then mapped to safe actions through a control barrier certification formulation. We evaluated our semantic safety filter approach in teleoperated tabletop manipulation tasks and pick-and-place tasks, demonstrating its effectiveness in incorporating semantic constraints to ensure safe robot operation beyond collision avoidance.
Is Data All That Matters? The Role of Control Frequency for Learning-Based Sampled-Data Control of Uncertain Systems
Mar 14, 2024Learning models or control policies from data has become a powerful tool to improve the performance of uncertain systems. While a strong focus has been placed on increasing the amount and quality of data to improve performance, data can never fully eliminate uncertainty, making feedback necessary to ensure stability and performance. We show that the control frequency at which the input is recalculated is a crucial design parameter, yet it has hardly been considered before. We address this gap by combining probabilistic model learning and sampled-data control. We use Gaussian processes (GPs) to learn a continuous-time model and compute a corresponding discrete-time controller. The result is an uncertain sampled-data control system, for which we derive robust stability conditions. We formulate semidefinite programs to compute the minimum control frequency required for stability and to optimize performance. As a result, our approach enables us to study the effect of both control frequency and data on stability and closed-loop performance. We show in numerical simulations of a quadrotor that performance can be improved by increasing either the amount of data or the control frequency, and that we can trade off one for the other. For example, by increasing the control frequency by 33%, we can reduce the number of data points by half while still achieving similar performance.
Uncertainty-Aware Visual Perception for Safe Motion Planning
Sep 14, 2022
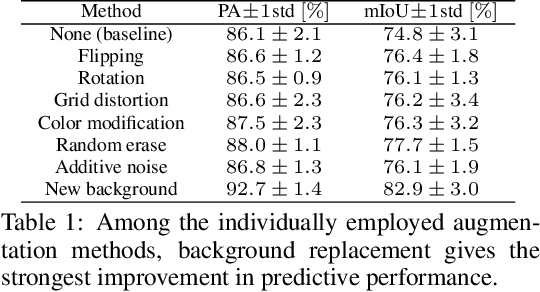
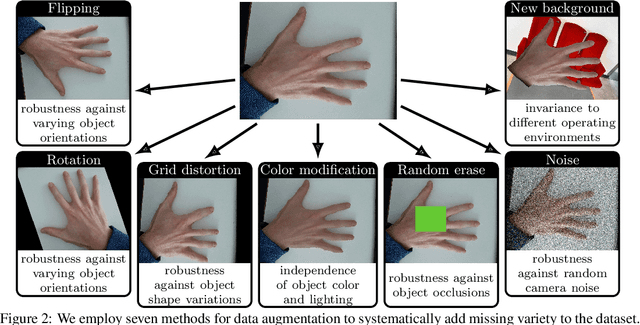
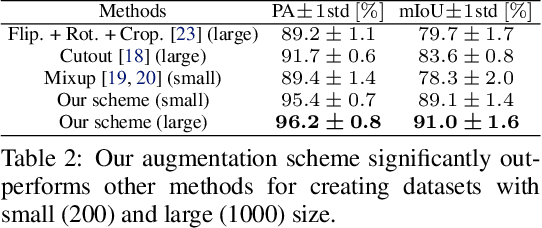
For safe operation, a robot must be able to avoid collisions in uncertain environments. Existing approaches for motion planning with uncertainties often make conservative assumptions about Gaussianity and the obstacle geometry. While visual perception can deliver a more accurate representation of the environment, its use for safe motion planning is limited by the inherent miscalibration of neural networks and the challenge of obtaining adequate datasets. In order to address these imitations, we propose to employ ensembles of deep semantic segmentation networks trained with systematically augmented datasets to ensure reliable probabilistic occupancy information. For avoiding conservatism during motion planning, we directly employ the probabilistic perception via a scenario-based path planning approach. A velocity scheduling scheme is applied to the path to ensure a safe motion despite tracking inaccuracies. We demonstrate the effectiveness of the systematic data augmentation in combination with deep ensembles and the proposed scenario-based planning approach in comparisons to state-of-the-art methods and validate our framework in an experiment involving a human hand.