 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBioReason: Incentivizing Multimodal Biological Reasoning within a DNA-LLM Model
May 29, 2025
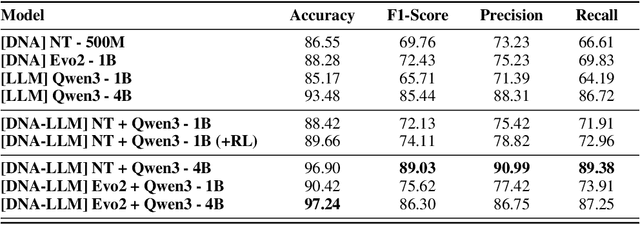


Unlocking deep, interpretable biological reasoning from complex genomic data is a major AI challenge hindering scientific discovery. Current DNA foundation models, despite strong sequence representation, struggle with multi-step reasoning and lack inherent transparent, biologically intuitive explanations. We introduce BioReason, a pioneering architecture that, for the first time, deeply integrates a DNA foundation model with a Large Language Model (LLM). This novel connection enables the LLM to directly process and reason with genomic information as a fundamental input, fostering a new form of multimodal biological understanding. BioReason's sophisticated multi-step reasoning is developed through supervised fine-tuning and targeted reinforcement learning, guiding the system to generate logical, biologically coherent deductions. On biological reasoning benchmarks including KEGG-based disease pathway prediction - where accuracy improves from 88% to 97% - and variant effect prediction, BioReason demonstrates an average 15% performance gain over strong single-modality baselines. BioReason reasons over unseen biological entities and articulates decision-making through interpretable, step-by-step biological traces, offering a transformative approach for AI in biology that enables deeper mechanistic insights and accelerates testable hypothesis generation from genomic data. Data, code, and checkpoints are publicly available at https://github.com/bowang-lab/BioReason
Semantically Safe Robot Manipulation: From Semantic Scene Understanding to Motion Safeguards
Oct 19, 2024



Ensuring safe interactions in human-centric environments requires robots to understand and adhere to constraints recognized by humans as "common sense" (e.g., "moving a cup of water above a laptop is unsafe as the water may spill" or "rotating a cup of water is unsafe as it can lead to pouring its content"). Recent advances in computer vision and machine learning have enabled robots to acquire a semantic understanding of and reason about their operating environments. While extensive literature on safe robot decision-making exists, semantic understanding is rarely integrated into these formulations. In this work, we propose a semantic safety filter framework to certify robot inputs with respect to semantically defined constraints (e.g., unsafe spatial relationships, behaviours, and poses) and geometrically defined constraints (e.g., environment-collision and self-collision constraints). In our proposed approach, given perception inputs, we build a semantic map of the 3D environment and leverage the contextual reasoning capabilities of large language models to infer semantically unsafe conditions. These semantically unsafe conditions are then mapped to safe actions through a control barrier certification formulation. We evaluated our semantic safety filter approach in teleoperated tabletop manipulation tasks and pick-and-place tasks, demonstrating its effectiveness in incorporating semantic constraints to ensure safe robot operation beyond collision avoidance.