 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwarm-GPT: Combining Large Language Models with Safe Motion Planning for Robot Choreography Design
Dec 02, 2023



This paper presents Swarm-GPT, a system that integrates large language models (LLMs) with safe swarm motion planning - offering an automated and novel approach to deployable drone swarm choreography. Swarm-GPT enables users to automatically generate synchronized drone performances through natural language instructions. With an emphasis on safety and creativity, Swarm-GPT addresses a critical gap in the field of drone choreography by integrating the creative power of generative models with the effectiveness and safety of model-based planning algorithms. This goal is achieved by prompting the LLM to generate a unique set of waypoints based on extracted audio data. A trajectory planner processes these waypoints to guarantee collision-free and feasible motion. Results can be viewed in simulation prior to execution and modified through dynamic re-prompting. Sim-to-real transfer experiments demonstrate Swarm-GPT's ability to accurately replicate simulated drone trajectories, with a mean sim-to-real root mean square error (RMSE) of 28.7 mm. To date, Swarm-GPT has been successfully showcased at three live events, exemplifying safe real-world deployment of pre-trained models.
AMSwarmX: Safe Swarm Coordination in CompleX Environments via Implicit Non-Convex Decomposition of the Obstacle-Free Space
Oct 13, 2023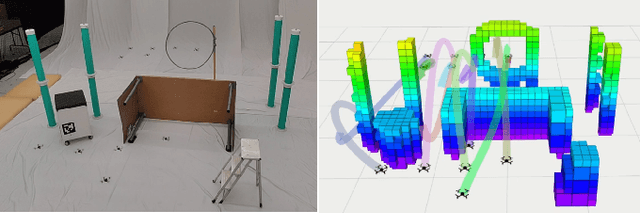
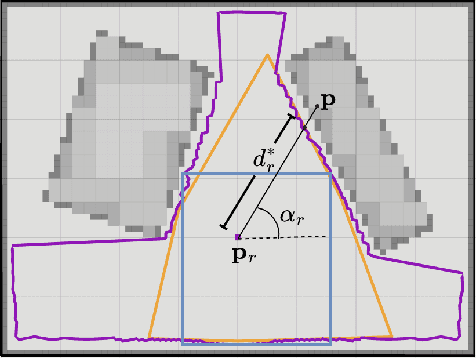
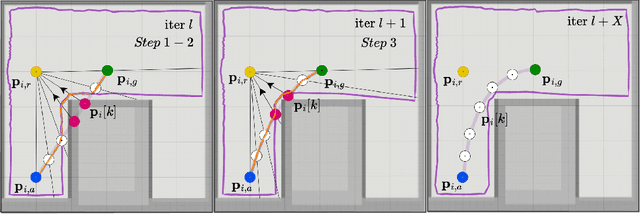
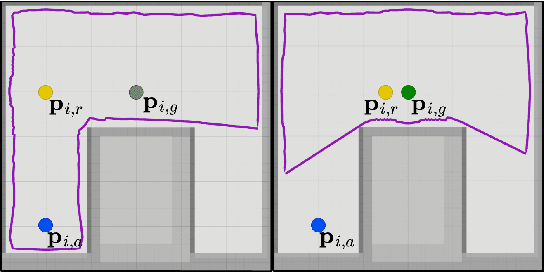
Quadrotor motion planning in complex environments leverage the concept of safe flight corridor (SFC) to facilitate static obstacle avoidance. Typically, SFCs are constructed through convex decomposition of the environment's free space into cuboids, convex polyhedra, or spheres. However, when dealing with a quadrotor swarm, such SFCs can be overly conservative, substantially limiting the available free space for quadrotors to coordinate. This paper presents an Alternating Minimization-based approach that does not require building a conservative free-space approximation. Instead, both static and dynamic collision constraints are treated in a unified manner. Dynamic collisions are handled based on shared position trajectories of the quadrotors. Static obstacle avoidance is coupled with distance queries from the Octomap, providing an implicit non-convex decomposition of free space. As a result, our approach is scalable to arbitrary complex environments. Through extensive comparisons in simulation, we demonstrate a $60\%$ improvement in success rate, an average $1.8\times$ reduction in mission completion time, and an average $23\times$ reduction in per-agent computation time compared to SFC-based approaches. We also experimentally validated our approach using a Crazyflie quadrotor swarm of up to 12 quadrotors in obstacle-rich environments. The code, supplementary materials, and videos are released for reference.
AMSwarm: An Alternating Minimization Approach for Safe Motion Planning of Quadrotor Swarms in Cluttered Environments
Mar 08, 2023



This paper presents a scalable online algorithm to generate safe and kinematically feasible trajectories for quadrotor swarms. Existing approaches rely on linearizing Euclidean distance-based collision constraints and on axis-wise decoupling of kinematic constraints to reduce the trajectory optimization problem for each quadrotor to a quadratic program (QP). This conservative approximation often fails to find a solution in cluttered environments. We present a novel alternative that handles collision constraints without linearization and kinematic constraints in their quadratic form while still retaining the QP form. We achieve this by reformulating the constraints in a polar form and applying an Alternating Minimization algorithm to the resulting problem. Through extensive simulation results, we demonstrate that, as compared to Sequential Convex Programming (SCP) baselines, our approach achieves on average a 72% improvement in success rate, a 36% reduction in mission time, and a 42 times faster per-agent computation time. We also show that collision constraints derived from discrete-time barrier functions (BF) can be incorporated, leading to different safety behaviours without significant computational overhead. Moreover, our optimizer outperforms the state-of-the-art optimal control solver ACADO in handling BF constraints with a 31 times faster per-agent computation time and a 44% reduction in mission time on average. We experimentally validated our approach on a Crazyflie quadrotor swarm of up to 12 quadrotors. The code with supplementary material and video are released for reference.
Multi-Modal Model Predictive Control through Batch Non-Holonomic Trajectory Optimization: Application to Highway Driving
Sep 21, 2021



Standard Model Predictive Control (MPC) or trajectory optimization approaches perform only a local search to solve a complex non-convex optimization problem. As a result, they cannot capture the multi-modal characteristic of human driving. A global optimizer can be a potential solution but is computationally intractable in a real-time setting. In this paper, we present a real-time MPC capable of searching over different driving modalities. Our basic idea is simple: we run several goal-directed parallel trajectory optimizations and score the resulting trajectories based on user-defined meta cost functions. This allows us to perform a global search over several locally optimal motion plans. Although conceptually straightforward, realizing this idea in real-time with existing optimizers is highly challenging from technical and computational standpoints. With this motivation, we present a novel batch non-holonomic trajectory optimization whose underlying matrix algebra is easily parallelizable across problem instances and reduces to computing large batch matrix-vector products. This structure, in turn, is achieved by deriving a linearization-free multi-convex reformulation of the non-holonomic kinematics and collision avoidance constraints. We extensively validate our approach using both synthetic and real data sets (NGSIM) of traffic scenarios. We highlight how our algorithm automatically takes lane-change and overtaking decisions based on the defined meta cost function. Our batch optimizer achieves trajectories with lower meta cost, up to 6x faster than competing baselines.