 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Online Robot-Agnostic Traversability Estimation for Open-World Environments
May 27, 2026Self-supervised online traversability estimation enables robots to continuously learn from unlabeled open-world experiences and adapt their navigation behavior toward safe and efficient trajectories. Existing approaches either rely on handcrafted proprioceptive traversability scores, limiting robot-agnosticism, or cluster prior data, preventing online learning. Moreover, many continual learning methods incur substantial memory and computational costs, hindering onboard deployment. We introduce COTRATE, an online learning framework for continuous traversability estimation from multimodal, unlabeled robot experience. Our method first infers robust traversability scores using a robot-agnostic, learning-based online terrain assessment module operating on proprioceptiveand inertial signals. These scores then supervise a visual traversability network through a novel alignment loss that associates visual embeddings with online terrain assessments.To mitigate forgetting during continual learning with minimal overhead, we propose a diversity-aware feature selection strategythat preserves performance using a compact replay memory. We further show that the learned traversability representation supports knowledge transfer across different robot platforms with different locomotion kinematics. We evaluate COTRATE on a dataset of \approx 50,000 images collected with two robotic platforms across 11 outdoor terrains, and benchmark it on navigation tasks in three representative outdoor environments. We make the dataset, code, and trained models publicly available.
cVLA: Towards Efficient Camera-Space VLAs
Jul 02, 2025Vision-Language-Action (VLA) models offer a compelling framework for tackling complex robotic manipulation tasks, but they are often expensive to train. In this paper, we propose a novel VLA approach that leverages the competitive performance of Vision Language Models (VLMs) on 2D images to directly infer robot end-effector poses in image frame coordinates. Unlike prior VLA models that output low-level controls, our model predicts trajectory waypoints, making it both more efficient to train and robot embodiment agnostic. Despite its lightweight design, our next-token prediction architecture effectively learns meaningful and executable robot trajectories. We further explore the underutilized potential of incorporating depth images, inference-time techniques such as decoding strategies, and demonstration-conditioned action generation. Our model is trained on a simulated dataset and exhibits strong sim-to-real transfer capabilities. We evaluate our approach using a combination of simulated and real data, demonstrating its effectiveness on a real robotic system.
Dual Agent Learning Based Aerial Trajectory Tracking
Oct 31, 2024This paper presents a novel reinforcement learning framework for trajectory tracking of unmanned aerial vehicles in cluttered environments using a dual-agent architecture. Traditional optimization methods for trajectory tracking face significant computational challenges and lack robustness in dynamic environments. Our approach employs deep reinforcement learning (RL) to overcome these limitations, leveraging 3D pointcloud data to perceive the environment without relying on memory-intensive obstacle representations like occupancy grids. The proposed system features two RL agents: one for predicting UAV velocities to follow a reference trajectory and another for managing collision avoidance in the presence of obstacles. This architecture ensures real-time performance and adaptability to uncertainties. We demonstrate the efficacy of our approach through simulated and real-world experiments, highlighting improvements over state-of-the-art RL and optimization-based methods. Additionally, a curriculum learning paradigm is employed to scale the algorithms to more complex environments, ensuring robust trajectory tracking and obstacle avoidance in both static and dynamic scenarios.
A Master-Follower Teleoperation System for Robotic Catheterization: Design, Characterization, and Tracking Control
Jul 18, 2024Minimally invasive robotic surgery has gained significant attention over the past two decades. Telerobotic systems, combined with robot-mediated minimally invasive techniques, have enabled surgeons and clinicians to mitigate radiation exposure for medical staff and extend medical services to remote and hard-to-reach areas. To enhance these services, teleoperated robotic surgery systems incorporating master and follower devices should offer transparency, enabling surgeons and clinicians to remotely experience a force interaction similar to the one the follower device experiences with patients' bodies. This paper presents the design and development of a three-degree-of-freedom master-follower teleoperated system for robotic catheterization. To resemble manual intervention by clinicians, the follower device features a grip-insert-release mechanism to eliminate catheter buckling and torsion during operation. The bidirectionally navigable ablation catheter is statically characterized for force-interactive medical interventions. The system's performance is evaluated through approaching and open-loop path tracking over typical circular, infinity-like, and spiral paths. Path tracking errors are presented as mean Euclidean error (MEE) and mean absolute error (MAE). The MEE ranges from 0.64 cm (infinity-like path) to 1.53 cm (spiral path). The MAE also ranges from 0.81 cm (infinity-like path) to 1.92 cm (spiral path). The results indicate that while the system's precision and accuracy with an open-loop controller meet the design targets, closed-loop controllers are necessary to address the catheter's hysteresis and dead zone, and system nonlinearities.
Differentiable-Optimization Based Neural Policy for Occlusion-Aware Target Tracking
Jun 20, 2024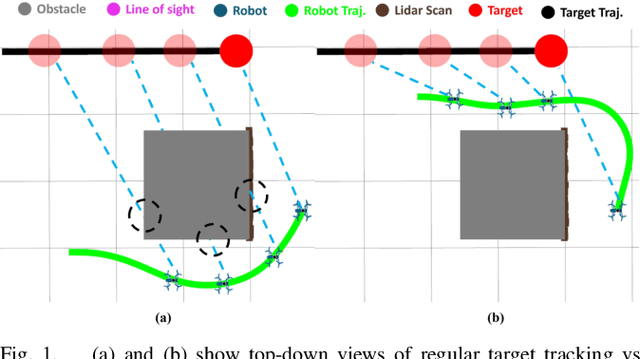
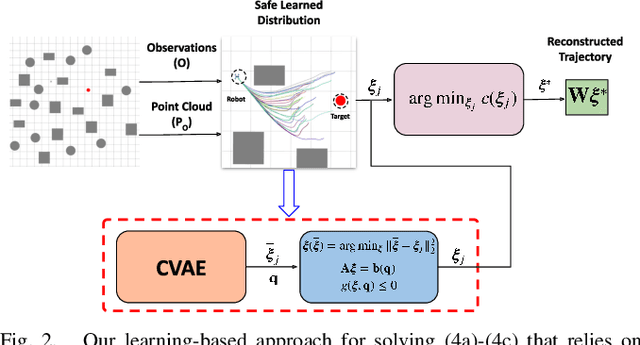
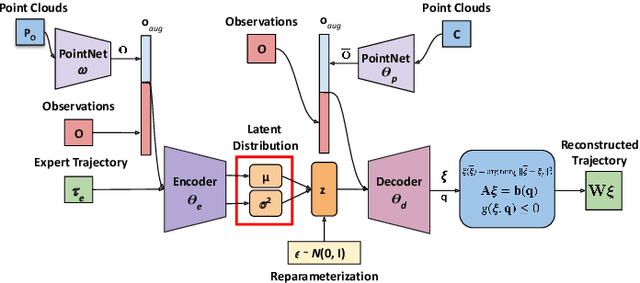

Tracking a target in cluttered and dynamic environments is challenging but forms a core component in applications like aerial cinematography. The obstacles in the environment not only pose collision risk but can also occlude the target from the field-of-view of the robot. Moreover, the target future trajectory may be unknown and only its current state can be estimated. In this paper, we propose a learned probabilistic neural policy for safe, occlusion-free target tracking. The core novelty of our work stems from the structure of our policy network that combines generative modeling based on Conditional Variational Autoencoder (CVAE) with differentiable optimization layers. The role of the CVAE is to provide a base trajectory distribution which is then projected onto a learned feasible set through the optimization layer. Furthermore, both the weights of the CVAE network and the parameters of the differentiable optimization can be learned in an end-to-end fashion through demonstration trajectories. We improve the state-of-the-art (SOTA) in the following respects. We show that our learned policy outperforms existing SOTA in terms of occlusion/collision avoidance capabilities and computation time. Second, we present an extensive ablation showing how different components of our learning pipeline contribute to the overall tracking task. We also demonstrate the real-time performance of our approach on resource-constrained hardware such as NVIDIA Jetson TX2. Finally, our learned policy can also be viewed as a reactive planner for navigation in highly cluttered environments.
PRIEST: Projection Guided Sampling-Based Optimization For Autonomous Navigation
Sep 15, 2023



Efficient navigation in unknown and dynamic environments is crucial for expanding the application domain of mobile robots. The core challenge stems from the nonavailability of a feasible global path for guiding optimization-based local planners. As a result, existing local planners often get trapped in poor local minima. In this paper, we present a novel optimizer that can explore multiple homotopies to plan high-quality trajectories over long horizons while still being fast enough for real-time applications. We build on the gradient-free paradigm by augmenting the trajectory sampling strategy with a projection optimization that guides the samples toward a feasible region. As a result, our approach can recover from the frequently encountered pathological cases wherein all the sampled trajectories lie in the high-cost region. Furthermore, we also show that our projection optimization has a highly parallelizable structure that can be easily accelerated over GPUs. We push the state-of-the-art in the following respects. Over the navigation stack of the Robot Operating System (ROS), we show an improvement of 7-13% in success rate and up to two times in total travel time metric. On the same benchmarks and metrics, our approach achieves up to 44% improvement over MPPI and its recent variants. On simple point-to-point navigation tasks, our optimizer is up to two times more reliable than SOTA gradient-based solvers, as well as sampling-based approaches such as the Cross-Entropy Method (CEM) and VPSTO. Codes: https://github.com/fatemeh-rastgar/PRIEST
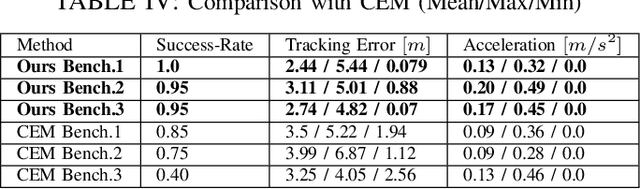
Real-Time Multi-Convex Model Predictive Control for Occlusion Free Target Tracking
Dec 22, 2021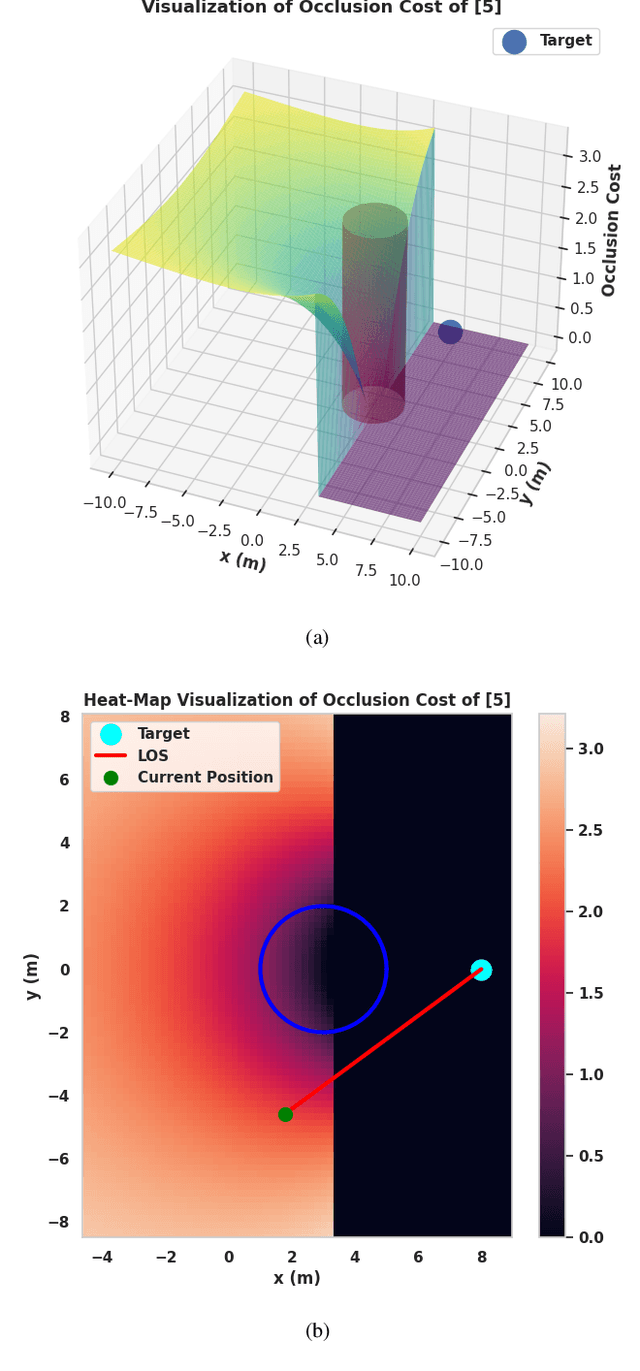
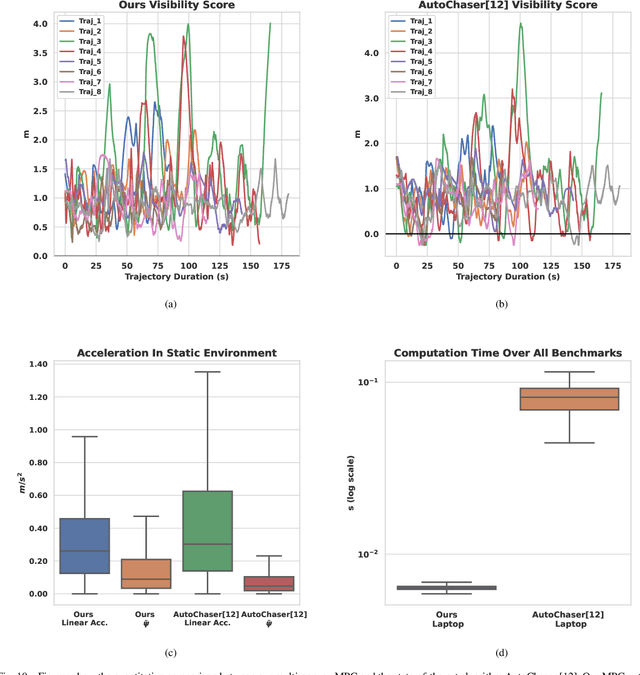
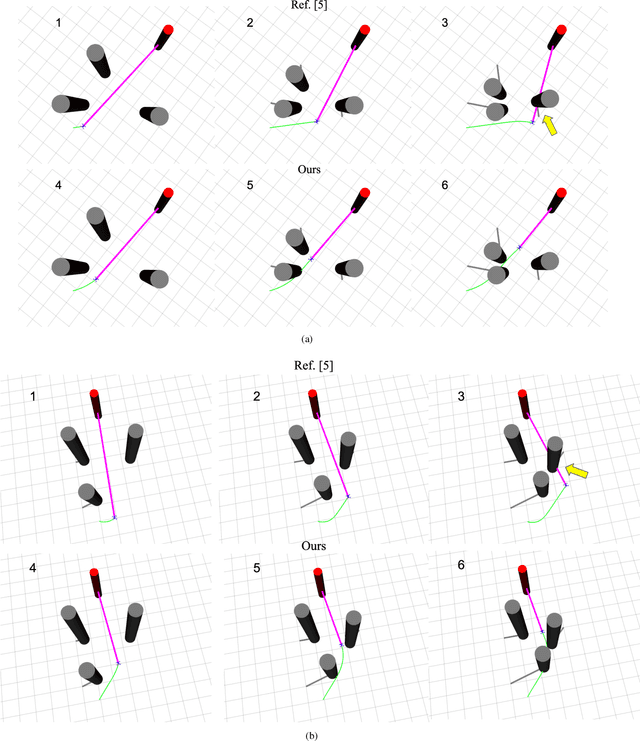

This paper proposes a Model Predictive Control (MPC) algorithm for target tracking amongst static and dynamic obstacles. Our main contribution lies in improving the computational tractability and reliability of the underlying non-convex trajectory optimization. The result is an MPC algorithm that runs real-time on laptops and embedded hardware devices such as Jetson TX2. Our approach relies on novel reformulations for the tracking, collision, and occlusion constraints that induce a multi-convex structure in the resulting trajectory optimization. We exploit these mathematical structures using the split Bregman Iteration technique, eventually reducing our MPC to a series of convex Quadratic Programs solvable in a few milliseconds. The fast re-planning of our MPC allows for occlusion and collision-free tracking in complex environments even while considering a simple constant-velocity prediction for the target trajectory and dynamic obstacles. We perform extensive bench-marking in a realistic physics engine and show that our MPC outperforms the state-of-the-art algorithms in visibility, smoothness, and computation-time metrics.
GPU Accelerated Batch Multi-Convex Trajectory Optimization for a Rectangular Holonomic Mobile Robot
Sep 27, 2021


We present a batch trajectory optimizer that can simultaneously solve hundreds of different instances of the problem in real-time. We consider holonomic robots but relax the assumption of circular base footprint. Our main algorithmic contributions lie in: (i) improving the computational tractability of the underlying non-convex problem and (ii) leveraging batch computation to mitigate initialization bottlenecks and improve solution quality. We achieve both goals by deriving a multi-convex reformulation of the kinematics and collision avoidance constraints. We exploit these structures through an Alternating Minimization approach and show that the resulting batch operation reduces to computing just matrix-vector products that can be trivially accelerated over GPUs. We improve the state-of-the-art in three respects. First, we improve quality of navigation (success-rate, tracking) as compared to baseline approach that relies on computing a single locally optimal trajectory at each control loop. Second, we show that when initialized with trajectory samples from a Gaussian distribution, our batch optimizer outperforms state-of-the-art cross-entropy method in solution quality. Finally, our batch optimizer is several orders of magnitude faster than the conceptually simpler alternative of running different optimization instances in parallel CPU threads. \textbf{Codes:} \url{https://tinyurl.com/a3b99m8}
Embedded Hardware Appropriate Fast 3D Trajectory Optimization for Fixed Wing Aerial Vehicles by Leveraging Hidden Convex Structures
Sep 26, 2021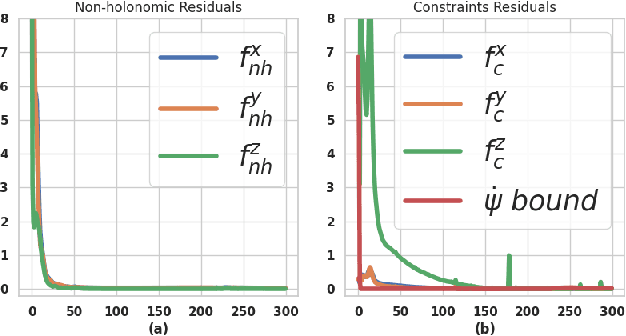
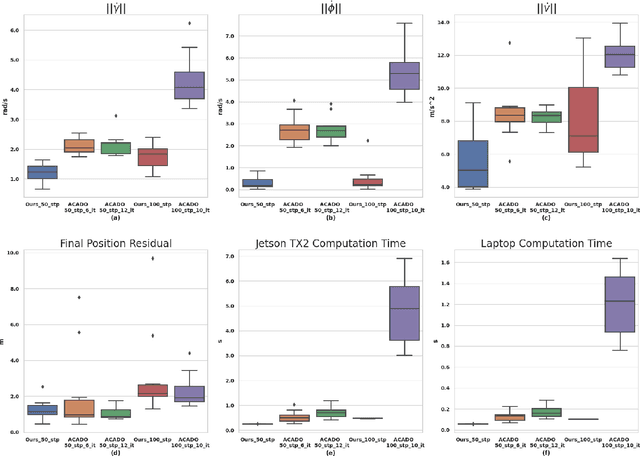
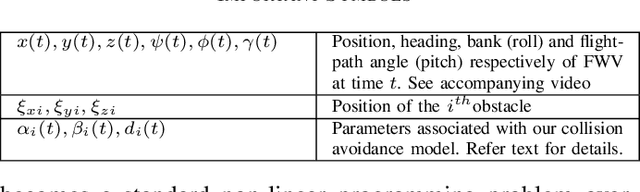
Most commercially available fixed-wing aerial vehicles (FWV) can carry only small, lightweight computing hardware such as Jetson TX2 onboard. Solving non-linear trajectory optimization on these computing resources is computationally challenging even while considering only the kinematic motion model. Most importantly, the computation time increases sharply as the environment becomes more cluttered. In this paper, we take a step towards overcoming this bottleneck and propose a trajectory optimizer that achieves online performance on both conventional laptops/desktops and Jetson TX2 in a typical urban environment setting. Our optimizer builds on the novel insight that the seemingly non-linear trajectory optimization problem for FWV has an implicit multi-convex structure. Our optimizer exploits these computational structures by bringing together diverse concepts from Alternating Minimization, Bregman iteration, and Alternating Direction Method of Multipliers. We show that our optimizer outperforms the state-of-the-art implementation of sequential quadratic programming approach in optimal control solver ACADO in computation time and solution quality measured in terms of control and goal reaching cost.
Multi-Modal Model Predictive Control through Batch Non-Holonomic Trajectory Optimization: Application to Highway Driving
Sep 21, 2021



Standard Model Predictive Control (MPC) or trajectory optimization approaches perform only a local search to solve a complex non-convex optimization problem. As a result, they cannot capture the multi-modal characteristic of human driving. A global optimizer can be a potential solution but is computationally intractable in a real-time setting. In this paper, we present a real-time MPC capable of searching over different driving modalities. Our basic idea is simple: we run several goal-directed parallel trajectory optimizations and score the resulting trajectories based on user-defined meta cost functions. This allows us to perform a global search over several locally optimal motion plans. Although conceptually straightforward, realizing this idea in real-time with existing optimizers is highly challenging from technical and computational standpoints. With this motivation, we present a novel batch non-holonomic trajectory optimization whose underlying matrix algebra is easily parallelizable across problem instances and reduces to computing large batch matrix-vector products. This structure, in turn, is achieved by deriving a linearization-free multi-convex reformulation of the non-holonomic kinematics and collision avoidance constraints. We extensively validate our approach using both synthetic and real data sets (NGSIM) of traffic scenarios. We highlight how our algorithm automatically takes lane-change and overtaking decisions based on the defined meta cost function. Our batch optimizer achieves trajectories with lower meta cost, up to 6x faster than competing baselines.