 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA guided residual search for nonlinear state-space identification
Feb 26, 2026Parameter estimation of nonlinear state-space models from input-output data typically requires solving a highly non-convex optimization problem prone to slow convergence and suboptimal solutions. This work improves the reliability and efficiency of the estimation process by decomposing the overall optimization problem into a sequence of tractable subproblems. Based on an initial linear model, nonlinear residual dynamics are first estimated via a guided residual search and subsequently refined using multiple-shooting optimization. Experimental results on two benchmarks demonstrate competitive performance relative to state-of-the-art black-box methods and improved convergence compared to naive initialization.
A sliding-window approach for latent restoring force modeling
Feb 25, 2026Restoring force surface (RFS) methods offer an attractive nonparametric framework for identifying nonlinear restoring forces directly from data, but their reliance on complete kinematic measurements at each degree of freedom limits scalability to multidimensional systems. The aim of this paper is to overcome these measurement limitations by proposing an identification framework with relaxed sensing requirements that exploits periodic multisine excitation. Starting from an initial linear model, a sliding-window feedback approach reconstructs latent states and nonlinear restoring forces nonparametrically, enabling identification of the nonlinear component through linear-in-parameters regression instead of highly non-convex optimization. Validation on synthetic and experimental datasets demonstrates high simulation accuracy and reliable recovery of physical parameters under partial sensing and noisy conditions.
Fast Motion Planning for Non-Holonomic Mobile Robots via a Rectangular Corridor Representation of Structured Environments
Feb 10, 2026We present a complete framework for fast motion planning of non-holonomic autonomous mobile robots in highly complex but structured environments. Conventional grid-based planners struggle with scalability, while many kinematically-feasible planners impose a significant computational burden due to their search space complexity. To overcome these limitations, our approach introduces a deterministic free-space decomposition that creates a compact graph of overlapping rectangular corridors. This method enables a significant reduction in the search space, without sacrificing path resolution. The framework then performs online motion planning by finding a sequence of rectangles and generating a near-time-optimal, kinematically-feasible trajectory using an analytical planner. The result is a highly efficient solution for large-scale navigation. We validate our framework through extensive simulations and on a physical robot. The implementation is publicly available as open-source software.
Fast Near Time-Optimal Motion Planning for Holonomic Vehicles in Structured Environments
Feb 02, 2026This paper proposes a novel and efficient optimization-based method for generating near time-optimal trajectories for holonomic vehicles navigating through complex but structured environments. The approach aims to solve the problem of motion planning for planar motion systems using magnetic levitation that can be used in assembly lines, automated laboratories or clean-rooms. In these applications, time-optimal trajectories that can be computed in real-time are required to increase productivity and allow the vehicles to be reactive if needed. The presented approach encodes the environment representation using free-space corridors and represents the motion of the vehicle through such a corridor using a motion primitive. These primitives are selected heuristically and define the trajectory with a limited number of degrees of freedom, which are determined in an optimization problem. As a result, the method achieves significantly lower computation times compared to the state-of-the-art, most notably solving a full Optimal Control Problem (OCP), OMG-tools or VP-STO without significantly compromising optimality within a fixed corridor sequence. The approach is benchmarked extensively in simulation and is validated on a real-world Beckhoff XPlanar system
Safe Motion Planning and Control Using Predictive and Adaptive Barrier Methods for Autonomous Surface Vessels
Oct 01, 2025Safe motion planning is essential for autonomous vessel operations, especially in challenging spaces such as narrow inland waterways. However, conventional motion planning approaches are often computationally intensive or overly conservative. This paper proposes a safe motion planning strategy combining Model Predictive Control (MPC) and Control Barrier Functions (CBFs). We introduce a time-varying inflated ellipse obstacle representation, where the inflation radius is adjusted depending on the relative position and attitude between the vessel and the obstacle. The proposed adaptive inflation reduces the conservativeness of the controller compared to traditional fixed-ellipsoid obstacle formulations. The MPC solution provides an approximate motion plan, and high-order CBFs ensure the vessel's safety using the varying inflation radius. Simulation and real-world experiments demonstrate that the proposed strategy enables the fully-actuated autonomous robot vessel to navigate through narrow spaces in real time and resolve potential deadlocks, all while ensuring safety.
Decoupling Collision Avoidance in and for Optimal Control using Least-Squares Support Vector Machines
May 16, 2025This paper details an approach to linearise differentiable but non-convex collision avoidance constraints tailored to convex shapes. It revisits introducing differential collision avoidance constraints for convex objects into an optimal control problem (OCP) using the separating hyperplane theorem. By framing this theorem as a classification problem, the hyperplanes are eliminated as optimisation variables from the OCP. This effectively transforms non-convex constraints into linear constraints. A bi-level algorithm computes the hyperplanes between the iterations of an optimisation solver and subsequently embeds them as parameters into the OCP. Experiments demonstrate the approach's favourable scalability towards cluttered environments and its applicability to various motion planning approaches. It decreases trajectory computation times between 50\% and 90\% compared to a state-of-the-art approach that directly includes the hyperplanes as variables in the optimal control problem.
Accelerated Reeds-Shepp and Under-Specified Reeds-Shepp Algorithms for Mobile Robot Path Planning
Apr 08, 2025In this study, we present a simple and intuitive method for accelerating optimal Reeds-Shepp path computation. Our approach uses geometrical reasoning to analyze the behavior of optimal paths, resulting in a new partitioning of the state space and a further reduction in the minimal set of viable paths. We revisit and reimplement classic methodologies from the literature, which lack contemporary open-source implementations, to serve as benchmarks for evaluating our method. Additionally, we address the under-specified Reeds-Shepp planning problem where the final orientation is unspecified. We perform exhaustive experiments to validate our solutions. Compared to the modern C++ implementation of the original Reeds-Shepp solution in the Open Motion Planning Library, our method demonstrates a 15x speedup, while classic methods achieve a 5.79x speedup. Both approaches exhibit machine-precision differences in path lengths compared to the original solution. We release our proposed C++ implementations for both the accelerated and under-specified Reeds-Shepp problems as open-source code.
* 19 pages, 27 figures
Robustified Time-optimal Point-to-point Motion Planning and Control under Uncertainty
Jan 24, 2025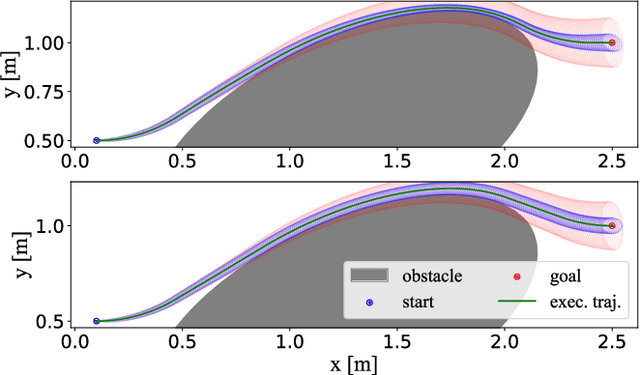
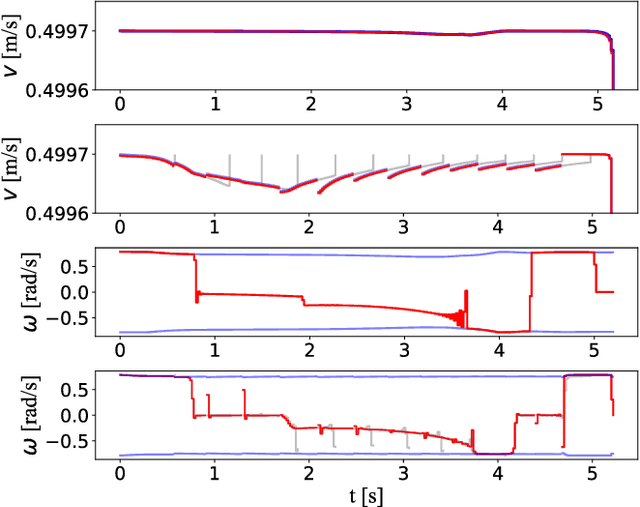
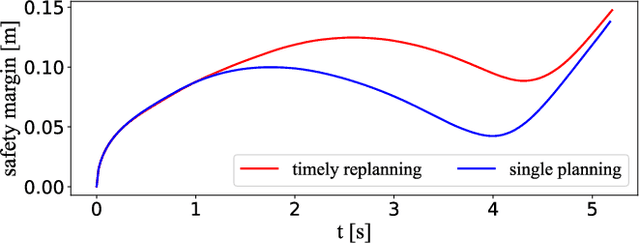
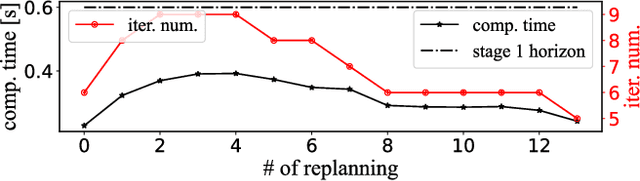
This paper proposes a novel approach to formulate time-optimal point-to-point motion planning and control under uncertainty. The approach defines a robustified two-stage Optimal Control Problem (OCP), in which stage 1, with a fixed time grid, is seamlessly stitched with stage 2, which features a variable time grid. Stage 1 optimizes not only the nominal trajectory, but also feedback gains and corresponding state covariances, which robustify constraints in both stages. The outcome is a minimized uncertainty in stage 1 and a minimized total motion time for stage 2, both contributing to the time optimality and safety of the total motion. A timely replanning strategy is employed to handle changes in constraints and maintain feasibility, while a tailored iterative algorithm is proposed for efficient, real-time OCP execution.
Exact Wavefront Propagation for Globally Optimal One-to-All Path Planning on 2D Cartesian Grids
Sep 17, 2024



This paper introduces an efficient $\mathcal{O}(n)$ compute and memory complexity algorithm for globally optimal path planning on 2D Cartesian grids. Unlike existing marching methods that rely on approximate discretized solutions to the Eikonal equation, our approach achieves exact wavefront propagation by pivoting the analytic distance function based on visibility. The algorithm leverages a dynamic-programming subroutine to efficiently evaluate visibility queries. Through benchmarking against state-of-the-art any-angle path planners, we demonstrate that our method outperforms existing approaches in both speed and accuracy, particularly in cluttered environments. Notably, our method inherently provides globally optimal paths to all grid points, eliminating the need for additional gradient descent steps per path query. The same capability extends to multiple starting positions. We also provide a greedy version of our algorithm as well as open-source C++ implementation of our solver.
Learning deformable linear object dynamics from a single trajectory
Jul 03, 2024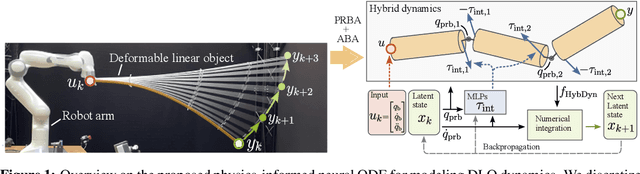
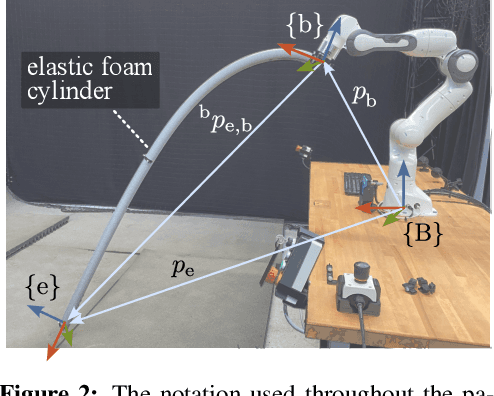
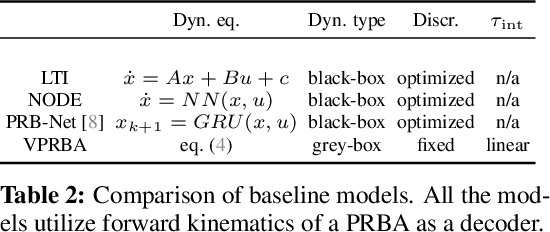
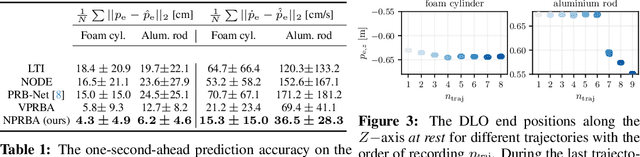
The manipulation of deformable linear objects (DLOs) via model-based control requires an accurate and computationally efficient dynamics model. Yet, data-driven DLO dynamics models require large training data sets while their predictions often do not generalize, whereas physics-based models rely on good approximations of physical phenomena and often lack accuracy. To address these challenges, we propose a physics-informed neural ODE capable of predicting agile movements with significantly less data and hyper-parameter tuning. In particular, we model DLOs as serial chains of rigid bodies interconnected by passive elastic joints in which interaction forces are predicted by neural networks. The proposed model accurately predicts the motion of an robotically-actuated aluminium rod and an elastic foam cylinder after being trained on only thirty seconds of data. The project code and data are available at: \url{https://tinyurl.com/neuralprba}