 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Generalizable Graph Learning for 3D Engineering AI: Explainable Workflows for CAE Mode Shape Classification and CFD Field Prediction
Apr 09, 2026Automotive engineering development increasingly relies on heterogeneous 3D data, including finite element (FE) models, body-in-white (BiW) representations, CAD geometry, and CFD meshes. At the same time, engineering teams face growing pressure to shorten development cycles, improve performance and accelerate innovation. Although artificial intelligence (AI) is increasingly explored in this domain, many current methods remain task-specific, difficult to interpret, and hard to reuse across development stages. This paper presents a practical graph learning framework for 3D engineering AI, in which heterogeneous engineering assets are converted into physics-aware graph representations and processed by Graph Neural Networks (GNNs). The framework is designed to support both classification and prediction tasks. The framework is validated on two automotive applications: CAE vibration mode shape classification and CFD aerodynamic field prediction. For CAE vibration mode classification, a region-aware BiW graph supports explainable mode classification across vehicle and FE variants under label scarcity. For CFD aerodynamic field prediction, a physics-informed surrogate predicts pressure and wall shear stress (WSS) across aerodynamic body shape variants, while symmetry preserving down sampling retains accuracy with lower computational cost. The framework also outlines data generation guidance that can help engineers identify which additional simulations or labels are valuable to collect next. These results demonstrate a practical and reusable engineering AI workflow for more trustworthy CAE and CFD decision support.
Automotive Engineering-Centric Agentic AI Workflow Framework
Apr 09, 2026Engineering workflows such as design optimization, simulation-based diagnosis, control tuning, and model-based systems engineering (MBSE) are iterative, constraint-driven, and shaped by prior decisions. Yet many AI methods still treat these activities as isolated tasks rather than as parts of a broader workflow. This paper presents Agentic Engineering Intelligence (AEI), an industrial vision framework that models engineering workflows as constrained, history-aware sequential decision processes in which AI agents support engineer-supervised interventions over engineering toolchains. AEI links an offline phase for engineering data processing and workflow-memory construction with an online phase for workflow-state estimation, retrieval, and decision support. A control-theoretic interpretation is also possible, in which engineering objectives act as reference signals, agents act as workflow controllers, and toolchains provide feedback for intervention selection. Representative automotive use cases in suspension design, reinforcement learning tuning, multimodal engineering knowledge reuse, aerodynamic exploration, and MBSE show how diverse workflows can be expressed within a common formulation. Overall, the paper positions engineering AI as a problem of process-level intelligence and outlines a practical roadmap for future empirical validation in industrial settings.
Imitation Learning from Observations: An Autoregressive Mixture of Experts Approach
Nov 12, 2024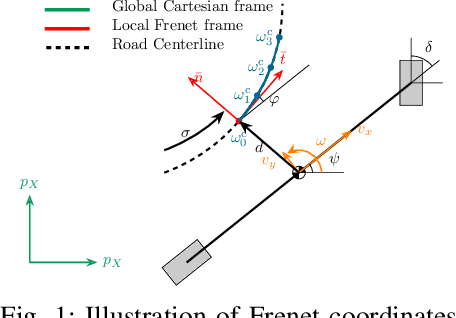
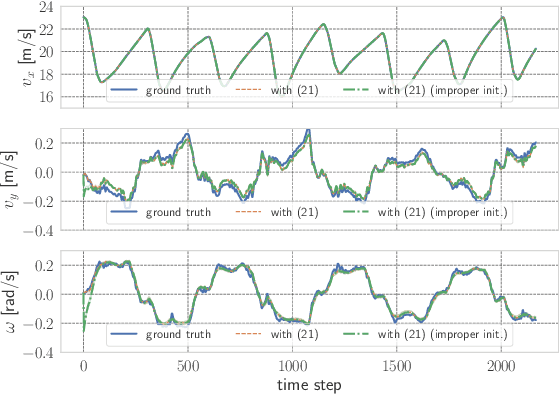
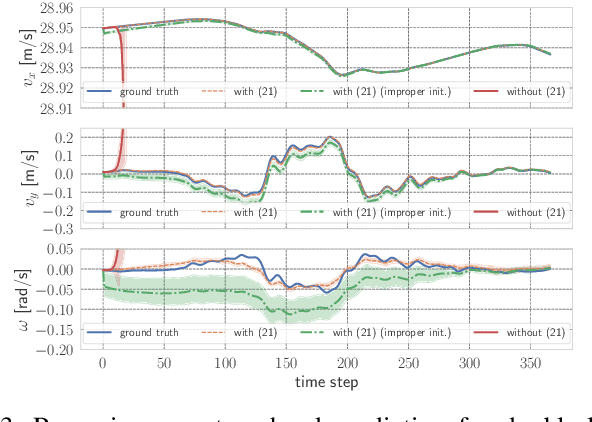
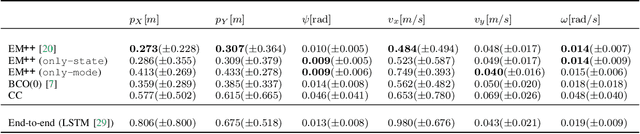
This paper presents a novel approach to imitation learning from observations, where an autoregressive mixture of experts model is deployed to fit the underlying policy. The parameters of the model are learned via a two-stage framework. By leveraging the existing dynamics knowledge, the first stage of the framework estimates the control input sequences and hence reduces the problem complexity. At the second stage, the policy is learned by solving a regularized maximum-likelihood estimation problem using the estimated control input sequences. We further extend the learning procedure by incorporating a Lyapunov stability constraint to ensure asymptotic stability of the identified model, for accurate multi-step predictions. The effectiveness of the proposed framework is validated using two autonomous driving datasets collected from human demonstrations, demonstrating its practical applicability in modelling complex nonlinear dynamics.
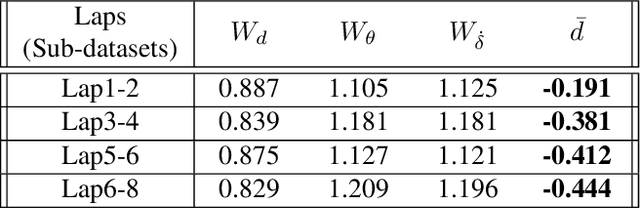
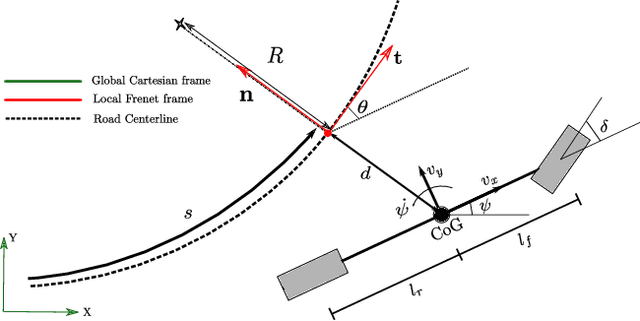
Learning from Visual Demonstrations through Differentiable Nonlinear MPC for Personalized Autonomous Driving
Mar 22, 2024



Human-like autonomous driving controllers have the potential to enhance passenger perception of autonomous vehicles. This paper proposes DriViDOC: a model for Driving from Vision through Differentiable Optimal Control, and its application to learn personalized autonomous driving controllers from human demonstrations. DriViDOC combines the automatic inference of relevant features from camera frames with the properties of nonlinear model predictive control (NMPC), such as constraint satisfaction. Our approach leverages the differentiability of parametric NMPC, allowing for end-to-end learning of the driving model from images to control. The model is trained on an offline dataset comprising various driving styles collected on a motion-base driving simulator. During online testing, the model demonstrates successful imitation of different driving styles, and the interpreted NMPC parameters provide insights into the achievement of specific driving behaviors. Our experimental results show that DriViDOC outperforms other methods involving NMPC and neural networks, exhibiting an average improvement of 20% in imitation scores.
AV-Occupant Perceived Risk Model for Cut-In Scenarios with Empirical Evaluation
Mar 22, 2024



Advancements in autonomous vehicle (AV) technologies necessitate precise estimation of perceived risk to enhance user comfort, acceptance and trust. This paper introduces a novel AV-Occupant Risk (AVOR) model designed for perceived risk estimation during AV cut-in scenarios. An empirical study is conducted with 18 participants with realistic cut-in scenarios. Two factors were investigated: scenario risk and scene population. 76% of subjective risk responses indicate an increase in perceived risk at cut-in initiation. The existing perceived risk model did not capture this critical phenomenon. Our AVOR model demonstrated a significant improvement in estimating perceived risk during the early stages of cut-ins, especially for the high-risk scenario, enhancing modelling accuracy by up to 54%. The concept of the AVOR model can quantify perceived risk in other diverse driving contexts characterized by dynamic uncertainties, enhancing the reliability and human-centred focus of AV systems.
Learning Based NMPC Adaptation for Autonomous Driving using Parallelized Digital Twin
Feb 26, 2024


In this work, we address the problem of transferring an autonomous driving (AD) module from one domain to another, in particular from simulation to the real world (Sim2Real). We propose a data-efficient method for online and on-the-fly learning based adaptation for parametrizable control architectures such that the target closed-loop performance is optimized under several uncertainty sources such as model mismatches, environment changes and task choice. The novelty of the work resides in leveraging black-box optimization enabled by executable digital twins, with data-driven hyper-parameter tuning through derivative-free methods to directly adapt in real-time the AD module. Our proposed method requires a minimal amount of interaction with the real-world in the randomization and online training phase. Specifically, we validate our approach in real-world experiments and show the ability to transfer and safely tune a nonlinear model predictive controller in less than 10 minutes, eliminating the need of day-long manual tuning and hours-long machine learning training phases. Our results show that the online adapted NMPC directly compensates for disturbances, avoids overtuning in simulation and for one specific task, and it generalizes for less than 15cm of tracking accuracy over a multitude of trajectories, and leads to 83% tracking improvement.
Reinforcement Learning from Simulation to Real World Autonomous Driving using Digital Twin
Nov 27, 2022



Reinforcement learning (RL) is a promising solution for autonomous vehicles to deal with complex and uncertain traffic environments. The RL training process is however expensive, unsafe, and time consuming. Algorithms are often developed first in simulation and then transferred to the real world, leading to a common sim2real challenge that performance decreases when the domain changes. In this paper, we propose a transfer learning process to minimize the gap by exploiting digital twin technology, relying on a systematic and simultaneous combination of virtual and real world data coming from vehicle dynamics and traffic scenarios. The model and testing environment are evolved from model, hardware to vehicle in the loop and proving ground testing stages, similar to standard development cycle in automotive industry. In particular, we also integrate other transfer learning techniques such as domain randomization and adaptation in each stage. The simulation and real data are gradually incorporated to accelerate and make the transfer learning process more robust. The proposed RL methodology is applied to develop a path following steering controller for an autonomous electric vehicle. After learning and deploying the real-time RL control policy on the vehicle, we obtained satisfactory and safe control performance already from the first deployment, demonstrating the advantages of the proposed digital twin based learning process.
Evaluation of MPC-based Imitation Learning for Human-like Autonomous Driving
Nov 25, 2022



This work evaluates and analyzes the combination of imitation learning (IL) and differentiable model predictive control (MPC) for the application of human-like autonomous driving. We combine MPC with a hierarchical learning-based policy, and measure its performance in open-loop and closed-loop with metrics related to safety, comfort and similarity to human driving characteristics. We also demonstrate the value of augmenting open-loop behavioral cloning with closed-loop training for a more robust learning, approximating the policy gradient through time with the state space model used by the MPC. We perform experimental evaluations on a lane keeping control system, learned from demonstrations collected on a fixed-base driving simulator, and show that our imitative policies approach the human driving style preferences.
Learning from Demonstrations of Critical Driving Behaviours Using Driver's Risk Field
Oct 04, 2022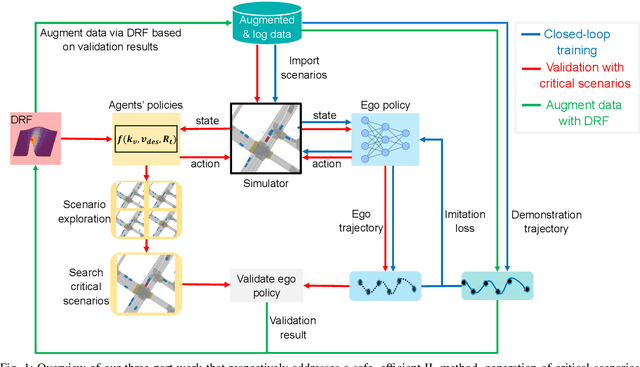
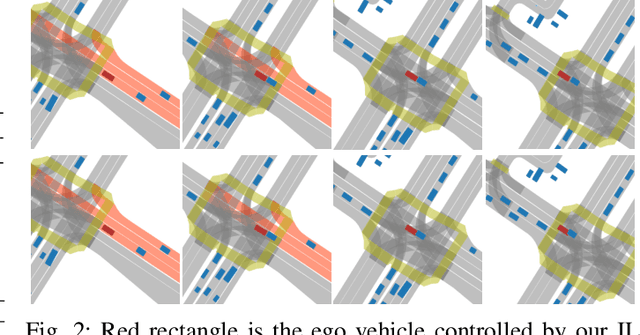
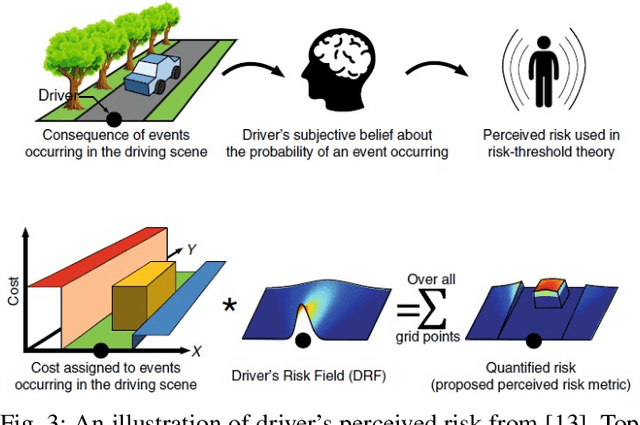
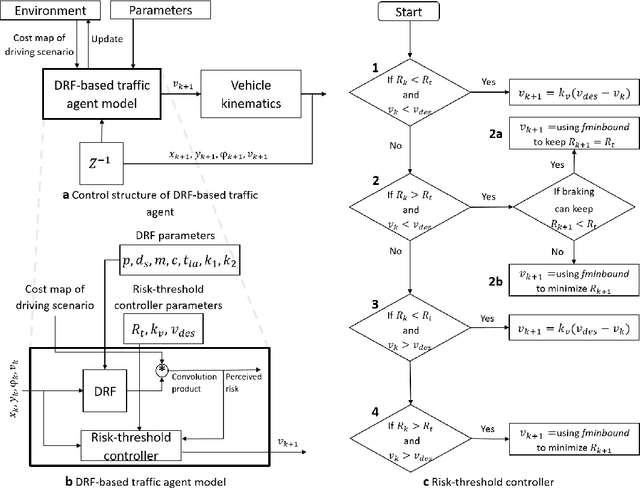
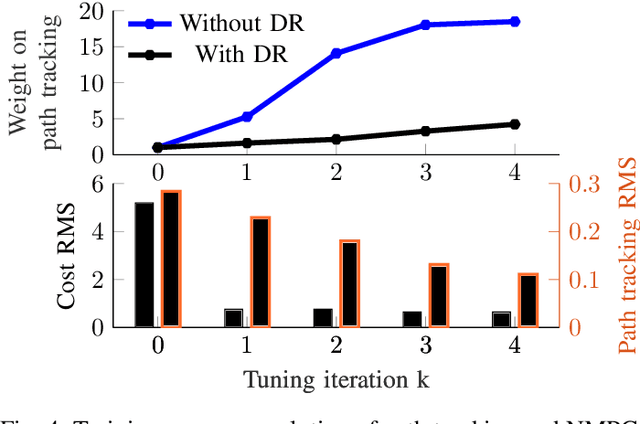
In recent years, imitation learning (IL) has been widely used in industry as the core of autonomous vehicle (AV) planning modules. However, previous work on IL planners shows sample inefficiency and low generalisation in safety-critical scenarios, on which they are rarely tested. As a result, IL planners can reach a performance plateau where adding more training data ceases to improve the learnt policy. First, our work presents an IL model using the spline coefficient parameterisation and offline expert queries to enhance safety and training efficiency. Then, we expose the weakness of the learnt IL policy by synthetically generating critical scenarios through optimisation of parameters of the driver's risk field (DRF), a parametric human driving behaviour model implemented in a multi-agent traffic simulator based on the Lyft Prediction Dataset. To continuously improve the learnt policy, we retrain the IL model with augmented data. Thanks to the expressivity and interpretability of the DRF, the desired driving behaviours can be encoded and aggregated to the original training data. Our work constitutes a full development cycle that can efficiently and continuously improve the learnt IL policies in closed-loop. Finally, we show that our IL planner developed with 30 times less training resource still has superior performance compared to the previous state-of-the-art.
MPC-based Imitation Learning for Safe and Human-like Autonomous Driving
Jun 24, 2022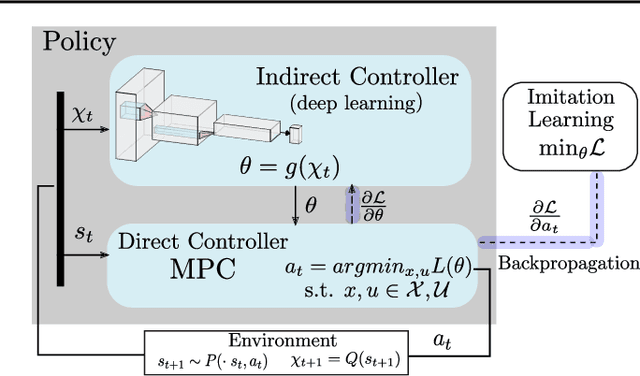
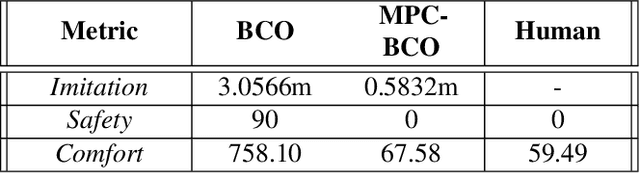
To ensure user acceptance of autonomous vehicles (AVs), control systems are being developed to mimic human drivers from demonstrations of desired driving behaviors. Imitation learning (IL) algorithms serve this purpose, but struggle to provide safety guarantees on the resulting closed-loop system trajectories. On the other hand, Model Predictive Control (MPC) can handle nonlinear systems with safety constraints, but realizing human-like driving with it requires extensive domain knowledge. This work suggests the use of a seamless combination of the two techniques to learn safe AV controllers from demonstrations of desired driving behaviors, by using MPC as a differentiable control layer within a hierarchical IL policy. With this strategy, IL is performed in closed-loop and end-to-end, through parameters in the MPC cost, model or constraints. Experimental results of this methodology are analyzed for the design of a lane keeping control system, learned via behavioral cloning from observations (BCO), given human demonstrations on a fixed-base driving simulator.