 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Instantaneous to Predictive Control: A More Intuitive and Tunable MPC Formulation for Robot Manipulators
Dec 02, 2024



Model predictive control (MPC) has become increasingly popular for the control of robot manipulators due to its improved performance compared to instantaneous control approaches. However, tuning these controllers remains a considerable hurdle. To address this hurdle, we propose a practical MPC formulation which retains the more interpretable tuning parameters of the instantaneous control approach while enhancing the performance through a prediction horizon. The formulation is motivated at hand of a simple example, highlighting the practical tuning challenges associated with typical MPC approaches and showing how the proposed formulation alleviates these challenges. Furthermore, the formulation is validated on a surface-following task, illustrating its applicability to industrially relevant scenarios. Although the research is presented in the context of robot manipulator control, we anticipate that the formulation is more broadly applicable.
Learning deformable linear object dynamics from a single trajectory
Jul 03, 2024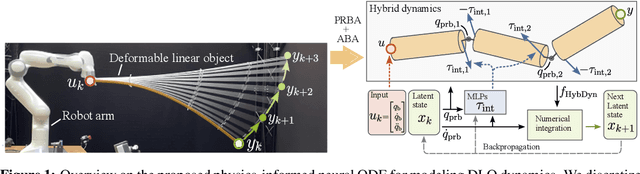
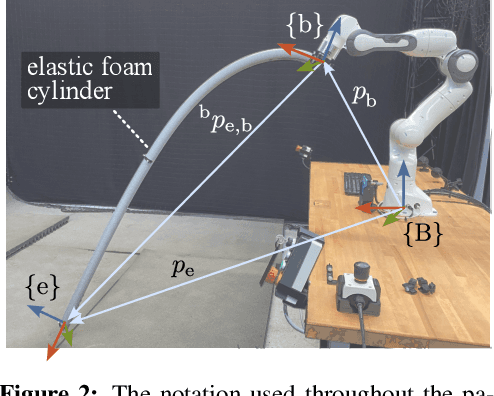
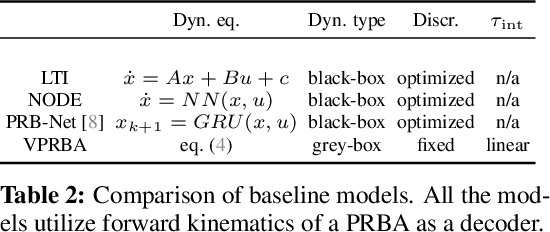
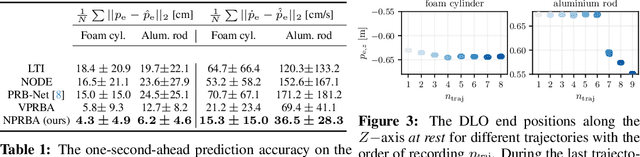
The manipulation of deformable linear objects (DLOs) via model-based control requires an accurate and computationally efficient dynamics model. Yet, data-driven DLO dynamics models require large training data sets while their predictions often do not generalize, whereas physics-based models rely on good approximations of physical phenomena and often lack accuracy. To address these challenges, we propose a physics-informed neural ODE capable of predicting agile movements with significantly less data and hyper-parameter tuning. In particular, we model DLOs as serial chains of rigid bodies interconnected by passive elastic joints in which interaction forces are predicted by neural networks. The proposed model accurately predicts the motion of an robotically-actuated aluminium rod and an elastic foam cylinder after being trained on only thirty seconds of data. The project code and data are available at: \url{https://tinyurl.com/neuralprba}