 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Coordinate-Invariant Local Representation of Motion and Force Trajectories for Identification and Generalization Across Coordinate Systems
Apr 11, 2026Identifying the trajectories of rigid bodies and of interaction forces is essential for a wide range of tasks in robotics, biomechanics, and related domains. These tasks include trajectory segmentation, recognition, and prediction. For these tasks, a key challenge lies in achieving consistent results when the trajectory is expressed in different coordinate systems. A way to address this challenge is to utilize trajectory models that can generalize across coordinate systems. The focus of this paper is on such trajectory models obtained by transforming the trajectory into a coordinate-invariant representation. However, coordinate-invariant representations often suffer from sensitivity to measurement noise and the manifestation of singularities in the representation, where the representation is not uniquely defined. This paper aims to address this limitation by introducing the novel Dual-Upper-Triangular Invariant Representation (DUTIR), with improved robustness to singularities, along with its computational algorithm. The proposed representation is formulated at a level of abstraction that makes it applicable to both rigid-body trajectories and interaction-force trajectories, hence making it a versatile tool for robotics, biomechanics, and related domains.
From Instantaneous to Predictive Control: A More Intuitive and Tunable MPC Formulation for Robot Manipulators
Dec 02, 2024



Model predictive control (MPC) has become increasingly popular for the control of robot manipulators due to its improved performance compared to instantaneous control approaches. However, tuning these controllers remains a considerable hurdle. To address this hurdle, we propose a practical MPC formulation which retains the more interpretable tuning parameters of the instantaneous control approach while enhancing the performance through a prediction horizon. The formulation is motivated at hand of a simple example, highlighting the practical tuning challenges associated with typical MPC approaches and showing how the proposed formulation alleviates these challenges. Furthermore, the formulation is validated on a surface-following task, illustrating its applicability to industrially relevant scenarios. Although the research is presented in the context of robot manipulator control, we anticipate that the formulation is more broadly applicable.
BILTS: A novel bi-invariant local trajectory-shape descriptor for rigid-body motion
May 07, 2024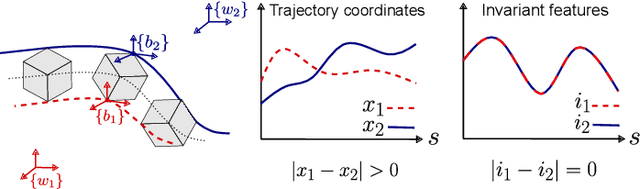
Measuring the similarity between motions and established motion models is crucial for motion analysis, recognition, generation, and adaptation. To enhance similarity measurement across diverse contexts, invariant motion descriptors have been proposed. However, for rigid-body motion, few invariant descriptors exist that are bi-invariant, meaning invariant to both the body and world reference frames used to describe the motion. Moreover, their robustness to singularities is limited. This paper introduces a novel Bi-Invariant Local Trajectory-Shape descriptor (BILTS) and a corresponding dissimilarity measure. Mathematical relationships between BILTS and existing descriptors are derived, providing new insights into their properties. The paper also includes an algorithm to reproduce the motion from the BILTS descriptor, demonstrating its bidirectionality and usefulness for trajectory generation. Experimental validation using datasets of daily-life activities shows the higher robustness of the BILTS descriptor compared to the bi-invariant ISA descriptor. This higher robustness supports the further application of bi-invariant descriptors for motion recognition and generalization.
Automatic Derivation of an Optimal Task Frame for Learning and Controlling Contact-Rich Tasks
Apr 03, 2024



This study investigates learning from demonstration (LfD) for contact-rich tasks. The procedure for choosing a task frame to express the learned signals for the motion and interaction wrench is often omitted or using expert insight. This article presents a procedure to derive the optimal task frame from motion and wrench data recorded during the demonstration. The procedure is based on two principles that are hypothesized to underpin the control configuration targeted by an expert, and assumes task frame origins and orientations that are fixed to either the world or the robot tool. It is rooted in screw theory, is entirely probabilistic and does not involve any hyperparameters. The procedure was validated by demonstrating several tasks, including surface following and manipulation of articulated objects, showing good agreement between the obtained and the assumed expert task frames. To validate the performance of the learned tasks by a UR10e robot, a constraint-based controller was designed based on the derived task frames and the learned data expressed therein. These experiments showed the effectiveness and versatility of the proposed approach. The task frame derivation approach fills a gap in the state of the art of LfD, bringing LfD for contact-rich tasks closer to practical application.
Invariant Descriptors of Motion and Force Trajectories for Interpreting Object Manipulation Tasks in Contact
Jun 19, 2023



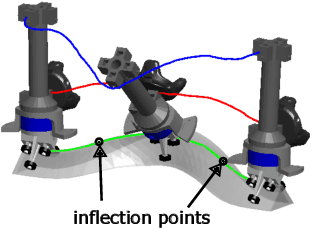
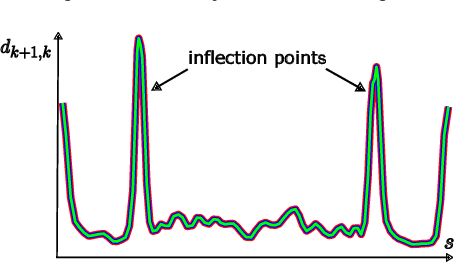
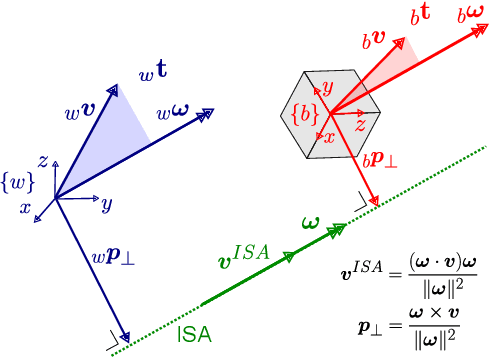
Invariant descriptors of point and rigid-body motion trajectories have been proposed in the past as representative task models for motion recognition and generalization. Currently, no invariant descriptor exists for representing force trajectories which appear in contact tasks. This paper introduces invariant descriptors for force trajectories by exploiting the duality between motion and force. Two types of invariant descriptors are presented depending on whether the trajectories consist of screw coordinates or vector coordinates. Methods and software are provided for robustly calculating the invariant descriptors from noisy measurements using optimal control. Using experimental human demonstrations of a 3D contour following task, invariant descriptors are shown to result in task representations that do not depend on the calibration of reference frames or sensor locations. Tuning of the optimal control problems is shown to be fast and intuitive. Similarly as for motions in free space, the proposed invariant descriptors for motion and force trajectories may prove useful for the recognition and generalization of constrained motions such as during object manipulation in contact.
Using Intent Estimation and Decision Theory to Support Lifting Motions with a Quasi-Passive Hip Exoskeleton
Apr 25, 2023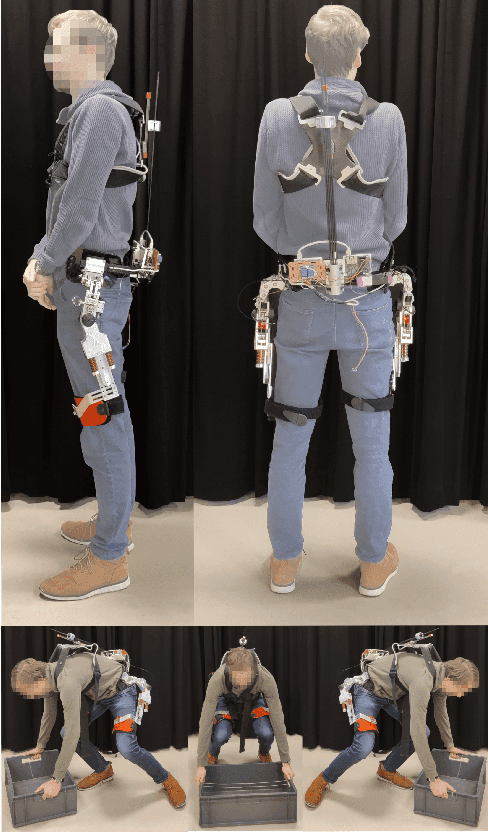
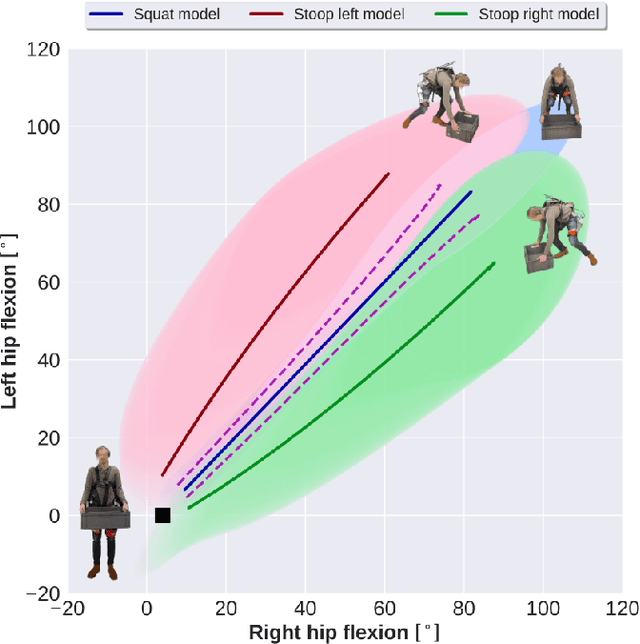

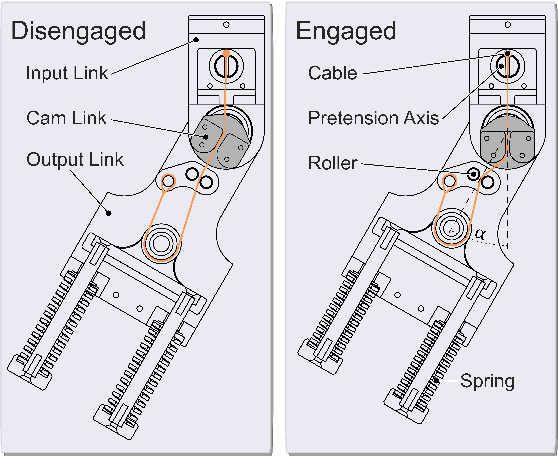
This paper compares three controllers for quasi-passive exoskeletons. The Utility Maximizing Controller (UMC) uses intent estimation to recognize user motions and decision theory to activate the support mechanism. The intent estimation algorithm requires demonstrations for each motion to be recognized. Depending on what motion is recognized, different control signals are sent to the exoskeleton. The Extended UMC (E-UMC) adds a calibration step and a velocity module to trigger the UMC. As a benchmark, and to compare the behavior of the controllers irrespective of the hardware, a Passive Exoskeleton Controller (PEC) is developed as well. The controllers were implemented on a hip exoskeleton and evaluated in a user study consisting of two phases. First, demonstrations of three motions were recorded: squat, stoop left and stoop right. Afterwards, the controllers were evaluated. The E-UMC combines benefits from the UMC and the PEC, confirming the need for the two extensions. The E-UMC discriminates between the three motions and does not generate false positives for previously unseen motions such as stair walking. The proposed methods can also be applied to support other motions.
Energy-Efficient Control of Cable Robots Exploiting Natural Dynamics and Task Knowledge
Mar 17, 2023This paper focusses on the energy-efficient control of a cable-driven robot for tasks that only require precise positioning at few points in their motion, and where that accuracy can be obtained through contacts. This includes the majority of pick-and-place operations. Knowledge about the task is directly taken into account when specifying the control execution. The natural dynamics of the system can be exploited when there is a tolerance on the position of the trajectory. Brakes are actively used to replace standstill torques, and as passive actuation. This is executed with a hybrid discrete-continuous controller. A discrete controller is used to specify and coordinate between subtasks, and based on the requirements of these specific subtasks, specific, robust, continuous controllers are constructed. This approach allows for less stiff and thus saver, and cheaper hardware to be used. For a planar pick-and-place operation, it was found that this results in energy savings of more than 30%. However, when the payload moves with the natural dynamics, there is less control of the followed trajectory and its timing compared to a traditional trajectory-based execution. Also, the presented approach implies a fundamentally different way to specify and execute tasks.
Py3DFreeHandUS: a library for voxel-array reconstruction using Ultrasonography and attitude sensors
Dec 19, 2014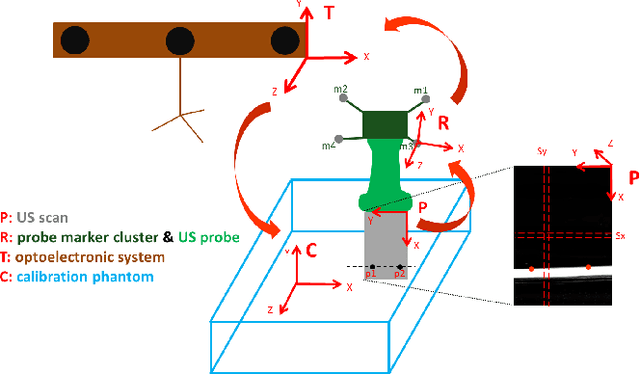
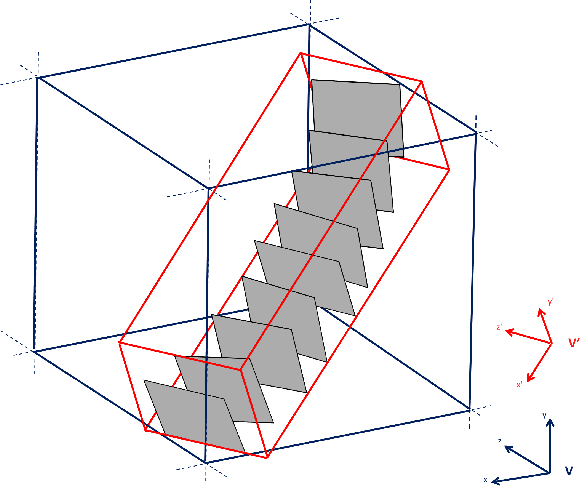
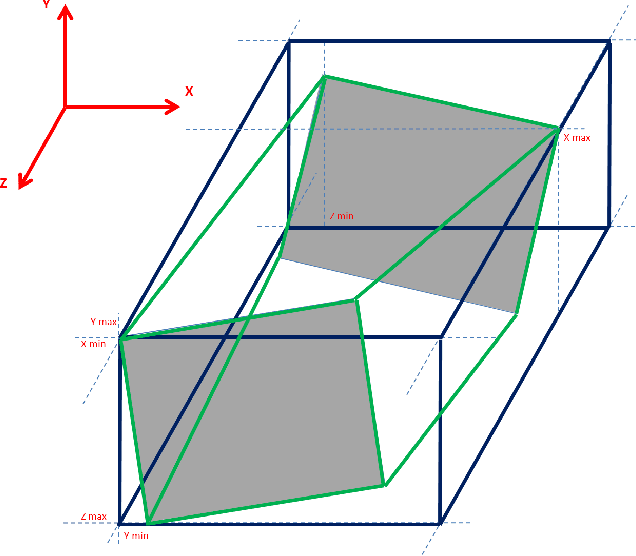
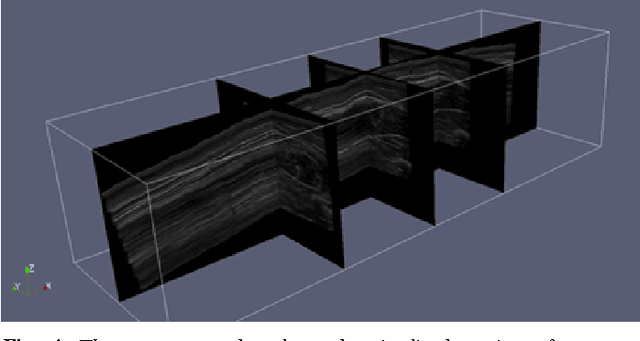
In medical imaging, there is a growing interest to provide real-time images with good quality for large anatomical structures. To cope with this issue, we developed a library that allows to replace, for some specific clinical applications, more robust systems such as Computer Tomography (CT) and Magnetic Resonance Imaging (MRI). Our python library Py3DFreeHandUS is a package for processing data acquired simultaneously by ultra-sonographic systems (US) and marker-based optoelectronic systems. In particular, US data enables to visualize subcutaneous body structures, whereas the optoelectronic system is able to collect the 3D position in space for reflective objects, that are called markers. By combining these two measurement devices, it is possible to reconstruct the real 3D morphology of body structures such as muscles, for relevant clinical implications. In the present research work, the different steps which allow to obtain a relevant 3D data set as well as the procedures for calibrating the systems and for determining the quality of the reconstruction.