 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Intent Estimation and Decision Theory to Support Lifting Motions with a Quasi-Passive Hip Exoskeleton
Apr 25, 2023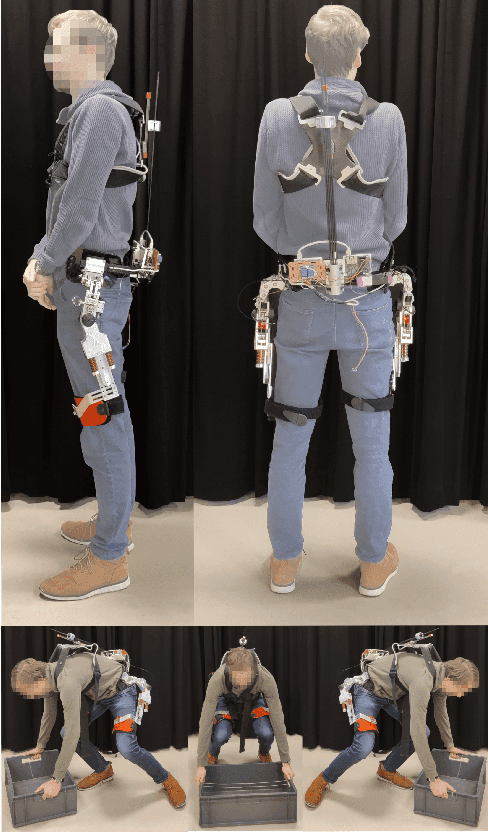
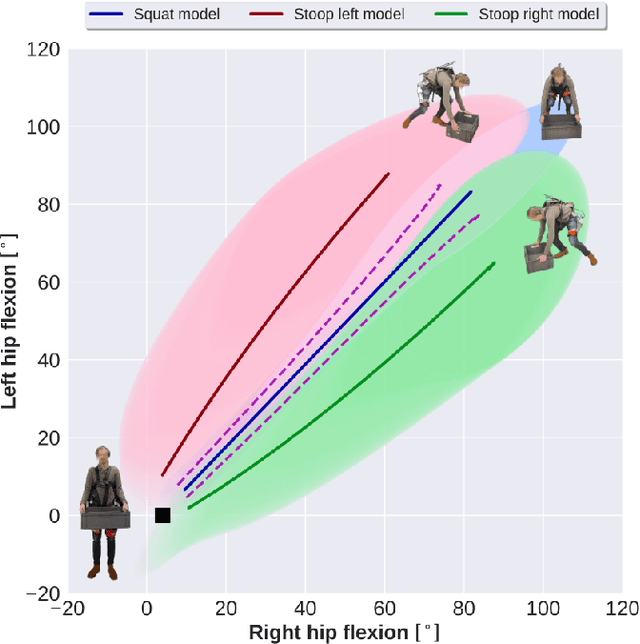

This paper compares three controllers for quasi-passive exoskeletons. The Utility Maximizing Controller (UMC) uses intent estimation to recognize user motions and decision theory to activate the support mechanism. The intent estimation algorithm requires demonstrations for each motion to be recognized. Depending on what motion is recognized, different control signals are sent to the exoskeleton. The Extended UMC (E-UMC) adds a calibration step and a velocity module to trigger the UMC. As a benchmark, and to compare the behavior of the controllers irrespective of the hardware, a Passive Exoskeleton Controller (PEC) is developed as well. The controllers were implemented on a hip exoskeleton and evaluated in a user study consisting of two phases. First, demonstrations of three motions were recorded: squat, stoop left and stoop right. Afterwards, the controllers were evaluated. The E-UMC combines benefits from the UMC and the PEC, confirming the need for the two extensions. The E-UMC discriminates between the three motions and does not generate false positives for previously unseen motions such as stair walking. The proposed methods can also be applied to support other motions.