 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBILTS: A novel bi-invariant local trajectory-shape descriptor for rigid-body motion
May 07, 2024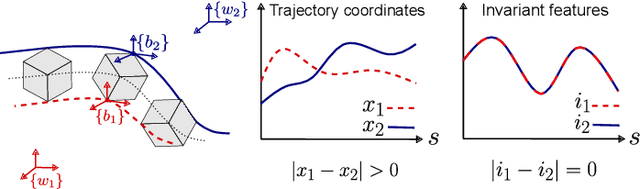
Measuring the similarity between motions and established motion models is crucial for motion analysis, recognition, generation, and adaptation. To enhance similarity measurement across diverse contexts, invariant motion descriptors have been proposed. However, for rigid-body motion, few invariant descriptors exist that are bi-invariant, meaning invariant to both the body and world reference frames used to describe the motion. Moreover, their robustness to singularities is limited. This paper introduces a novel Bi-Invariant Local Trajectory-Shape descriptor (BILTS) and a corresponding dissimilarity measure. Mathematical relationships between BILTS and existing descriptors are derived, providing new insights into their properties. The paper also includes an algorithm to reproduce the motion from the BILTS descriptor, demonstrating its bidirectionality and usefulness for trajectory generation. Experimental validation using datasets of daily-life activities shows the higher robustness of the BILTS descriptor compared to the bi-invariant ISA descriptor. This higher robustness supports the further application of bi-invariant descriptors for motion recognition and generalization.