 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvariant Descriptors of Motion and Force Trajectories for Interpreting Object Manipulation Tasks in Contact
Jun 19, 2023



Invariant descriptors of point and rigid-body motion trajectories have been proposed in the past as representative task models for motion recognition and generalization. Currently, no invariant descriptor exists for representing force trajectories which appear in contact tasks. This paper introduces invariant descriptors for force trajectories by exploiting the duality between motion and force. Two types of invariant descriptors are presented depending on whether the trajectories consist of screw coordinates or vector coordinates. Methods and software are provided for robustly calculating the invariant descriptors from noisy measurements using optimal control. Using experimental human demonstrations of a 3D contour following task, invariant descriptors are shown to result in task representations that do not depend on the calibration of reference frames or sensor locations. Tuning of the optimal control problems is shown to be fast and intuitive. Similarly as for motions in free space, the proposed invariant descriptors for motion and force trajectories may prove useful for the recognition and generalization of constrained motions such as during object manipulation in contact.
A Rigorously Bayesian Beam Model and an Adaptive Full Scan Model for Range Finders in Dynamic Environments
Jan 15, 2014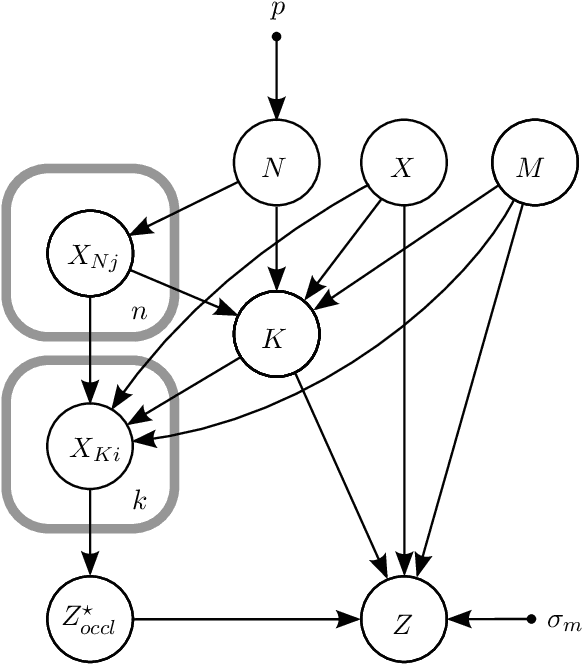
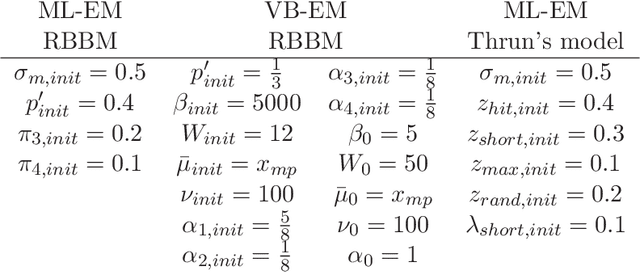


This paper proposes and experimentally validates a Bayesian network model of a range finder adapted to dynamic environments. All modeling assumptions are rigorously explained, and all model parameters have a physical interpretation. This approach results in a transparent and intuitive model. With respect to the state of the art beam model this paper: (i) proposes a different functional form for the probability of range measurements caused by unmodeled objects, (ii) intuitively explains the discontinuity encountered in te state of the art beam model, and (iii) reduces the number of model parameters, while maintaining the same representational power for experimental data. The proposed beam model is called RBBM, short for Rigorously Bayesian Beam Model. A maximum likelihood and a variational Bayesian estimator (both based on expectation-maximization) are proposed to learn the model parameters. Furthermore, the RBBM is extended to a full scan model in two steps: first, to a full scan model for static environments and next, to a full scan model for general, dynamic environments. The full scan model accounts for the dependency between beams and adapts to the local sample density when using a particle filter. In contrast to Gaussian-based state of the art models, the proposed full scan model uses a sample-based approximation. This sample-based approximation enables handling dynamic environments and capturing multi-modality, which occurs even in simple static environments.
Domain Specific Language for Geometric Relations between Rigid Bodies targeted to robotic applications
Apr 10, 2013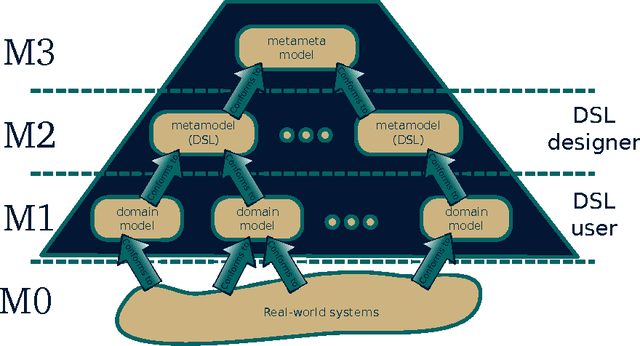
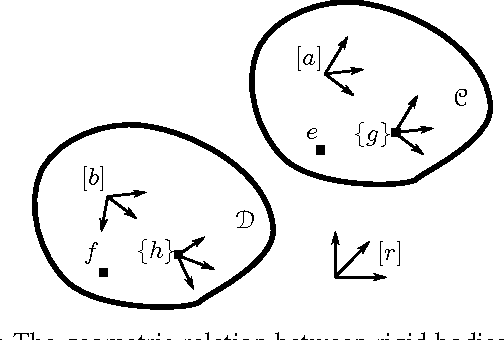
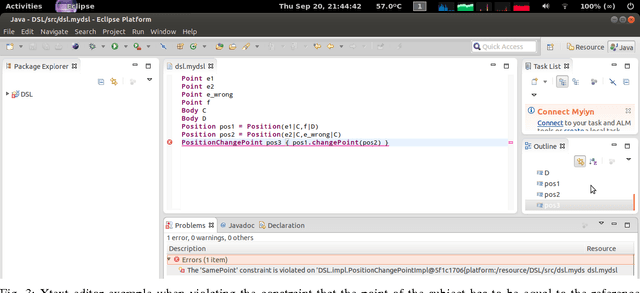

This paper presents a DSL for geometric relations between rigid bodies such as relative position, orientation, pose, linear velocity, angular velocity, and twist. The DSL is the formal model of the recently proposed semantics for the standardization of geometric relations between rigid bodies, referred to as `geometric semantics'. This semantics explicitly states the coordinate-invariant properties and operations, and, more importantly, all the choices that are made in coordinate representations of these geometric relations. This results in a set of concrete suggestions for standardizing terminology and notation, allowing programmers to write fully unambiguous software interfaces, including automatic checks for semantic correctness of all geometric operations on rigid-body coordinate representations. The DSL is implemented in two different ways: an external DSL in Xcore and an internal DSL in Prolog. Besides defining a grammar and operations, the DSL also implements constraints. In the Xcore model, the Object Constraint Language language is used, while in the Prolog model, the constraint are natively modelled in Prolog. This paper discusses the implemented DSL and the tools developed on top of this DSL. In particular an editor, checking the semantic constraints and providing semantic meaningful errors during editing is proposed.