 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Rigorously Bayesian Beam Model and an Adaptive Full Scan Model for Range Finders in Dynamic Environments
Paper and Code
Jan 15, 2014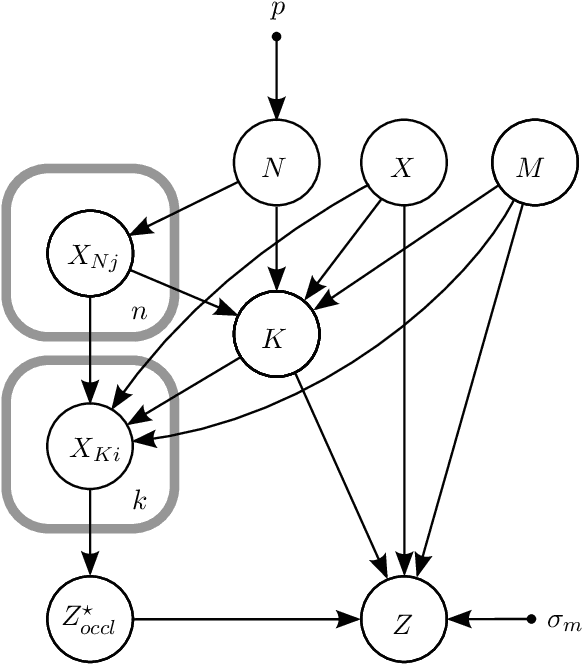
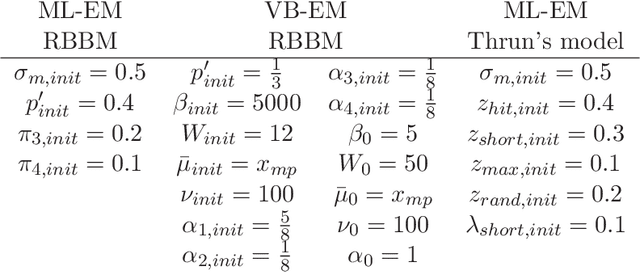


This paper proposes and experimentally validates a Bayesian network model of a range finder adapted to dynamic environments. All modeling assumptions are rigorously explained, and all model parameters have a physical interpretation. This approach results in a transparent and intuitive model. With respect to the state of the art beam model this paper: (i) proposes a different functional form for the probability of range measurements caused by unmodeled objects, (ii) intuitively explains the discontinuity encountered in te state of the art beam model, and (iii) reduces the number of model parameters, while maintaining the same representational power for experimental data. The proposed beam model is called RBBM, short for Rigorously Bayesian Beam Model. A maximum likelihood and a variational Bayesian estimator (both based on expectation-maximization) are proposed to learn the model parameters. Furthermore, the RBBM is extended to a full scan model in two steps: first, to a full scan model for static environments and next, to a full scan model for general, dynamic environments. The full scan model accounts for the dependency between beams and adapts to the local sample density when using a particle filter. In contrast to Gaussian-based state of the art models, the proposed full scan model uses a sample-based approximation. This sample-based approximation enables handling dynamic environments and capturing multi-modality, which occurs even in simple static environments.