 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrain-Parameterized Coupled Dynamics and Dual-Camera Visual Servoing for Aerial Continuum Manipulators
Mar 24, 2026Tendon-driven aerial continuum manipulators (TD-ACMs) combine the maneuverability of uncrewed aerial vehicles (UAVs) with the compliance of lightweight continuum robots (CRs). Existing coupled dynamic modeling approaches for TD-ACMs incur high computational costs and do not explicitly account for aerial platform underactuation. To address these limitations, this paper presents a generalized dynamic formulation of a coupled TD-ACM with an underactuated base. The proposed approach integrates a strain-parameterized Cosserat rod model with a rigid-body model of the UAV into a unified Lagrangian ordinary differential equation (ODE) framework on $\mathrm{SE}(3)$, thereby eliminating computationally intensive symbolic derivations. Building upon the developed model, a robust dual-camera image-based visual servoing (IBVS) scheme is introduced. The proposed controller mitigates the field-of-view (FoV) limitations of conventional IBVS, compensates for attitude-induced image motion caused by UAV lateral dynamics, and incorporates a low-level adaptive controller to address modeling uncertainties with formal stability guarantees. Extensive simulations and experimental validation on a compact custom-built prototype demonstrate the effectiveness and robustness of the proposed framework in real-world scenarios.
Deep Visual Servoing of an Aerial Robot Using Keypoint Feature Extraction
Mar 29, 2025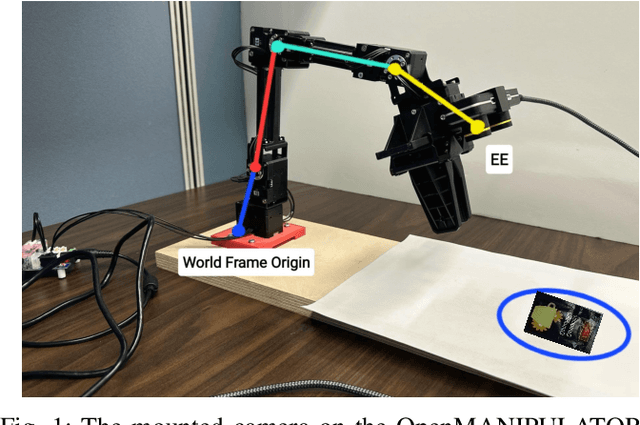
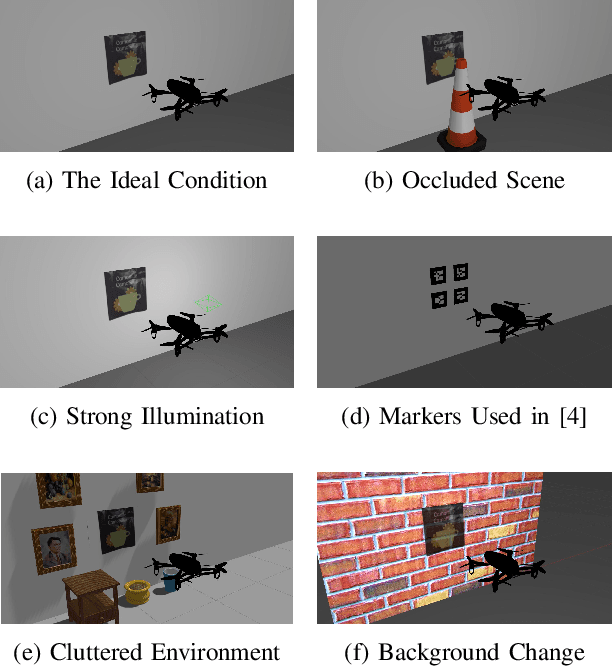
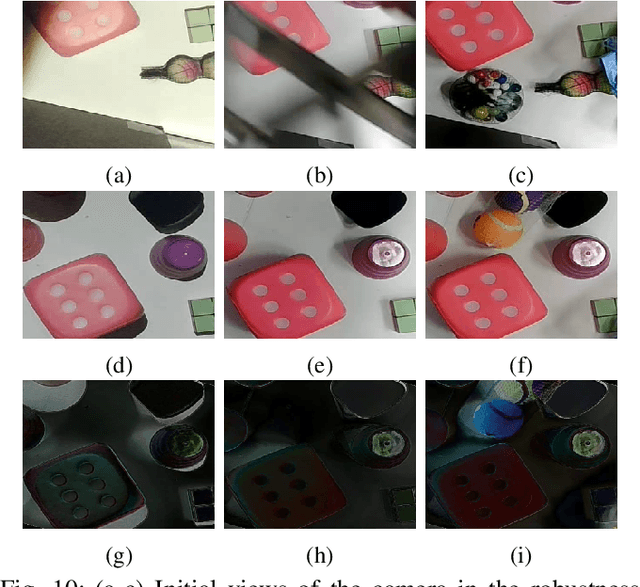
The problem of image-based visual servoing (IBVS) of an aerial robot using deep-learning-based keypoint detection is addressed in this article. A monocular RGB camera mounted on the platform is utilized to collect the visual data. A convolutional neural network (CNN) is then employed to extract the features serving as the visual data for the servoing task. This paper contributes to the field by circumventing not only the challenge stemming from the need for man-made marker detection in conventional visual servoing techniques, but also enhancing the robustness against undesirable factors including occlusion, varying illumination, clutter, and background changes, thereby broadening the applicability of perception-guided motion control tasks in aerial robots. Additionally, extensive physics-based ROS Gazebo simulations are conducted to assess the effectiveness of this method, in contrast to many existing studies that rely solely on physics-less simulations. A demonstration video is available at https://youtu.be/Dd2Her8Ly-E.
Hybrid Visual Servoing of Tendon-driven Continuum Robots
Feb 19, 2025



This paper introduces a novel Hybrid Visual Servoing (HVS) approach for controlling tendon-driven continuum robots (TDCRs). The HVS system combines Image-Based Visual Servoing (IBVS) with Deep Learning-Based Visual Servoing (DLBVS) to overcome the limitations of each method and improve overall performance. IBVS offers higher accuracy and faster convergence in feature-rich environments, while DLBVS enhances robustness against disturbances and offers a larger workspace. By enabling smooth transitions between IBVS and DLBVS, the proposed HVS ensures effective control in dynamic, unstructured environments. The effectiveness of this approach is validated through simulations and real-world experiments, demonstrating that HVS achieves reduced iteration time, faster convergence, lower final error, and smoother performance compared to DLBVS alone, while maintaining DLBVS's robustness in challenging conditions such as occlusions, lighting changes, actuator noise, and physical impacts.
Backstepping Control of Tendon-Driven Continuum Robots in Large Deflections Using the Cosserat Rod Model
Dec 16, 2024



This paper presents a study on the backstepping control of tendon-driven continuum robots for large deflections using the Cosserat rod model. Continuum robots are known for their flexibility and adaptability, making them suitable for various applications. However, modeling and controlling them pose challenges due to their nonlinear dynamics. To model their dynamics, the Cosserat rod method is employed to account for significant deflections, and a numerical solution method is developed to solve the resulting partial differential equations. Previous studies on controlling tendon-driven continuum robots using Cosserat rod theory focused on sliding mode control and were not tested for large deflections, lacking experimental validation. In this paper, backstepping control is proposed as an alternative to sliding mode control for achieving a significant bending. The numerical results are validated through experiments in this study, demonstrating that the proposed backstepping control approach is a promising solution for achieving large deflections with smoother trajectories, reduced settling time, and lower overshoot. Furthermore, two scenarios involving external forces and disturbances were introduced to further highlight the robustness of the backstepping control approach.
Dual Agent Learning Based Aerial Trajectory Tracking
Oct 31, 2024This paper presents a novel reinforcement learning framework for trajectory tracking of unmanned aerial vehicles in cluttered environments using a dual-agent architecture. Traditional optimization methods for trajectory tracking face significant computational challenges and lack robustness in dynamic environments. Our approach employs deep reinforcement learning (RL) to overcome these limitations, leveraging 3D pointcloud data to perceive the environment without relying on memory-intensive obstacle representations like occupancy grids. The proposed system features two RL agents: one for predicting UAV velocities to follow a reference trajectory and another for managing collision avoidance in the presence of obstacles. This architecture ensures real-time performance and adaptability to uncertainties. We demonstrate the efficacy of our approach through simulated and real-world experiments, highlighting improvements over state-of-the-art RL and optimization-based methods. Additionally, a curriculum learning paradigm is employed to scale the algorithms to more complex environments, ensuring robust trajectory tracking and obstacle avoidance in both static and dynamic scenarios.
A Master-Follower Teleoperation System for Robotic Catheterization: Design, Characterization, and Tracking Control
Jul 18, 2024Minimally invasive robotic surgery has gained significant attention over the past two decades. Telerobotic systems, combined with robot-mediated minimally invasive techniques, have enabled surgeons and clinicians to mitigate radiation exposure for medical staff and extend medical services to remote and hard-to-reach areas. To enhance these services, teleoperated robotic surgery systems incorporating master and follower devices should offer transparency, enabling surgeons and clinicians to remotely experience a force interaction similar to the one the follower device experiences with patients' bodies. This paper presents the design and development of a three-degree-of-freedom master-follower teleoperated system for robotic catheterization. To resemble manual intervention by clinicians, the follower device features a grip-insert-release mechanism to eliminate catheter buckling and torsion during operation. The bidirectionally navigable ablation catheter is statically characterized for force-interactive medical interventions. The system's performance is evaluated through approaching and open-loop path tracking over typical circular, infinity-like, and spiral paths. Path tracking errors are presented as mean Euclidean error (MEE) and mean absolute error (MAE). The MEE ranges from 0.64 cm (infinity-like path) to 1.53 cm (spiral path). The MAE also ranges from 0.81 cm (infinity-like path) to 1.92 cm (spiral path). The results indicate that while the system's precision and accuracy with an open-loop controller meet the design targets, closed-loop controllers are necessary to address the catheter's hysteresis and dead zone, and system nonlinearities.
Differentiable-Optimization Based Neural Policy for Occlusion-Aware Target Tracking
Jun 20, 2024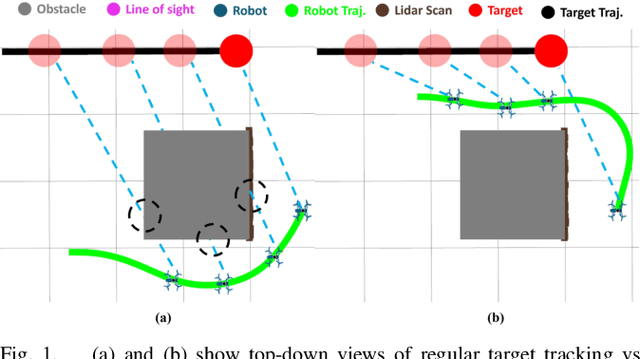
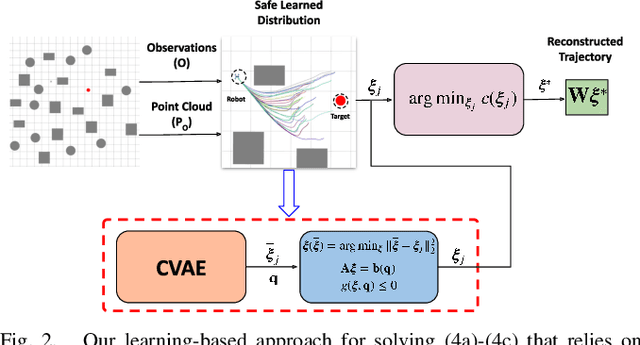
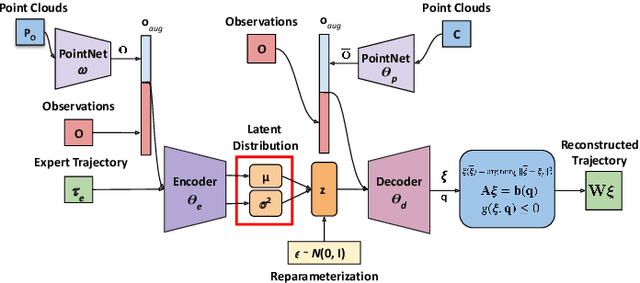

Tracking a target in cluttered and dynamic environments is challenging but forms a core component in applications like aerial cinematography. The obstacles in the environment not only pose collision risk but can also occlude the target from the field-of-view of the robot. Moreover, the target future trajectory may be unknown and only its current state can be estimated. In this paper, we propose a learned probabilistic neural policy for safe, occlusion-free target tracking. The core novelty of our work stems from the structure of our policy network that combines generative modeling based on Conditional Variational Autoencoder (CVAE) with differentiable optimization layers. The role of the CVAE is to provide a base trajectory distribution which is then projected onto a learned feasible set through the optimization layer. Furthermore, both the weights of the CVAE network and the parameters of the differentiable optimization can be learned in an end-to-end fashion through demonstration trajectories. We improve the state-of-the-art (SOTA) in the following respects. We show that our learned policy outperforms existing SOTA in terms of occlusion/collision avoidance capabilities and computation time. Second, we present an extensive ablation showing how different components of our learning pipeline contribute to the overall tracking task. We also demonstrate the real-time performance of our approach on resource-constrained hardware such as NVIDIA Jetson TX2. Finally, our learned policy can also be viewed as a reactive planner for navigation in highly cluttered environments.
Image-to-Joint Inverse Kinematic of a Supportive Continuum Arm Using Deep Learning
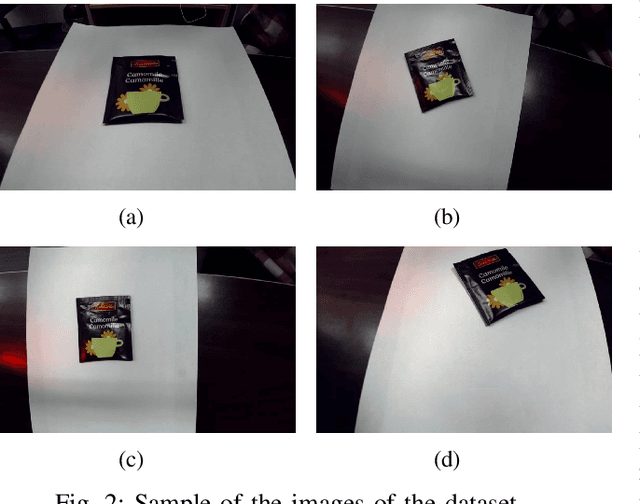
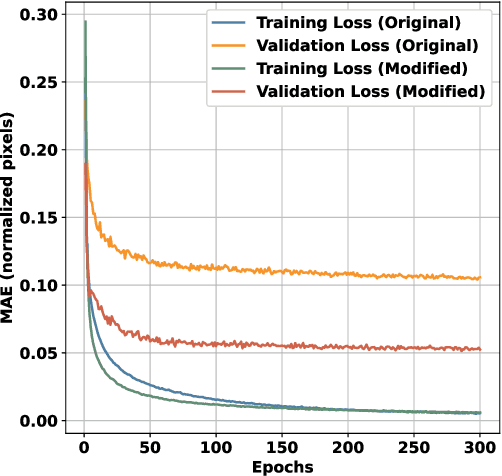
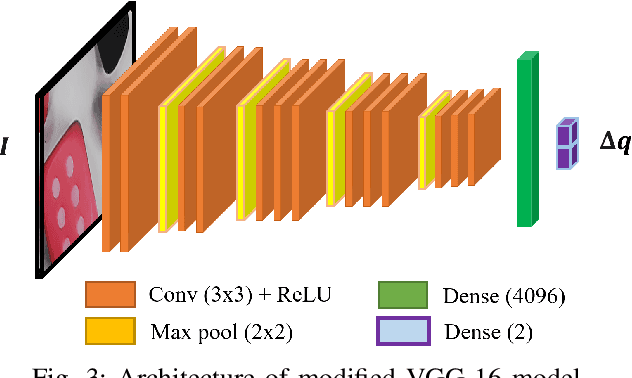
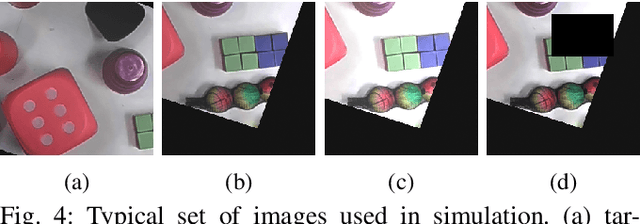
May 30, 2024In this work, a deep learning-based technique is used to study the image-to-joint inverse kinematics of a tendon-driven supportive continuum arm. An eye-off-hand configuration is considered by mounting a camera at a fixed pose with respect to the inertial frame attached at the arm base. This camera captures an image for each distinct joint variable at each sampling time to construct the training dataset. This dataset is then employed to adapt a feed-forward deep convolutional neural network, namely the modified VGG-16 model, to estimate the joint variable. One thousand images are recorded to train the deep network, and transfer learning and fine-tuning techniques are applied to the modified VGG-16 to further improve the training. Finally, training is also completed with a larger dataset of images that are affected by various types of noises, changes in illumination, and partial occlusion. The main contribution of this research is the development of an image-to-joint network that can estimate the joint variable given an image of the arm, even if the image is not captured in an ideal condition. The key benefits of this research are twofold: 1) image-to-joint mapping can offer a real-time alternative to computationally complex inverse kinematic mapping through analytical models; and 2) the proposed technique can provide robustness against noise, occlusion, and changes in illumination. The dataset is publicly available on Kaggle.
Deep Direct Visual Servoing of Tendon-Driven Continuum Robots
Nov 04, 2021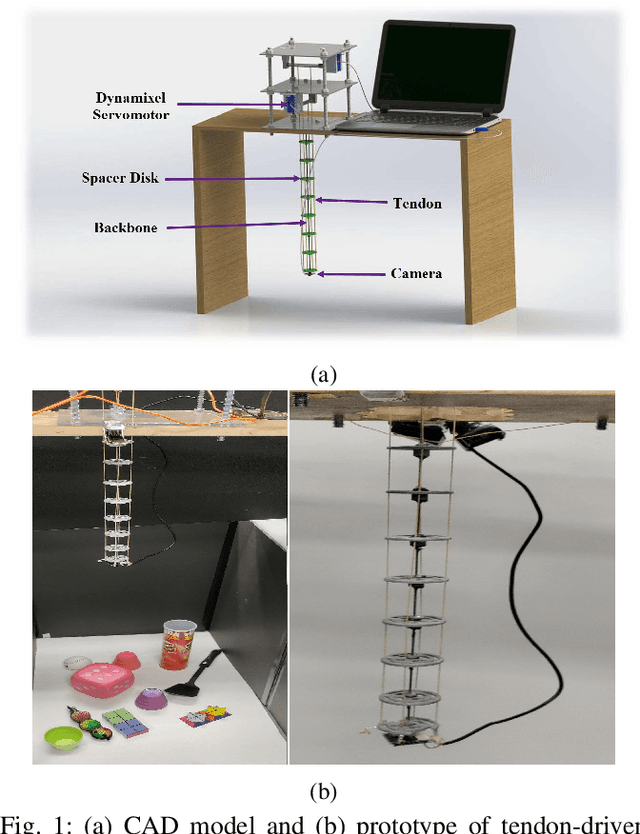
Vision-based control has found a key place in the research to tackle the requirement of the state feedback when controlling a continuum robot under physical sensing limitations. Traditional visual servoing requires feature extraction and tracking while the imaging device captures the images, which limits the controller's efficiency. We hypothesize that employing deep learning models and implementing direct visual servoing can effectively resolve the issue by eliminating the tracking requirement and controlling the continuum robot without requiring an exact system model. In this paper, we control a single-section tendon-driven continuum robot utilizing a modified VGG-16 deep learning network and an eye-in-hand direct visual servoing approach. The proposed algorithm is first developed in Blender using only one input image of the target and then implemented on a real robot. The convergence and accuracy of the results in normal, shadowed, and occluded scenes reflected by the sum of absolute difference between the normalized target and captured images prove the effectiveness and robustness of the proposed controller.
Path Planning and Controlled Crash Landing of a Quadcopter in case of a Rotor Failure
Sep 25, 2018
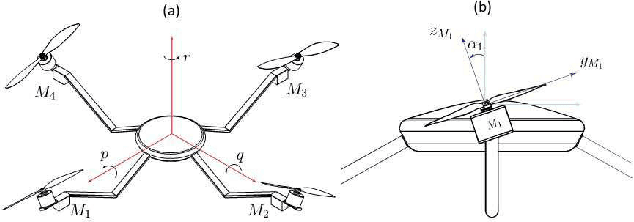
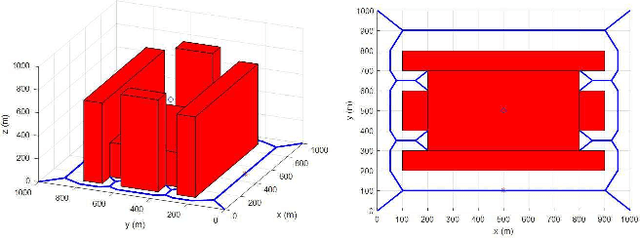
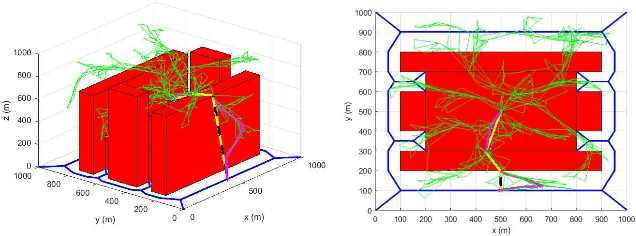
This paper presents a framework for controlled emergency landing of a quadcopter, experiencing a rotor failure, away from sensitive areas. A complete mathematical model capturing the dynamics of the system is presented that takes the asymmetrical aerodynamic load on the propellers into account. An equilibrium state of the system is calculated around which a linear time-invariant control strategy is developed to stabilize the system. By utilizing the proposed model, a specific configuration for a quadcopter is introduced that leads to the minimum power consumption during a yaw-rate-resolved hovering after a rotor failure. Furthermore, given a 3D representation of the environment, an optimal flight trajectory towards a safe crash landing spot, while avoiding collision with obstacles, is developed using an RRT* approach. The cost function for determining the best landing spot consists of: (i) finding the safest landing spot with the largest clearance from the obstacles; and (ii) finding the most energy-efficient trajectory towards the landing spot. The performance of the proposed framework is tested via simulations.