 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRaspberry PhenoSet: A Phenology-based Dataset for Automated Growth Detection and Yield Estimation
Nov 01, 2024

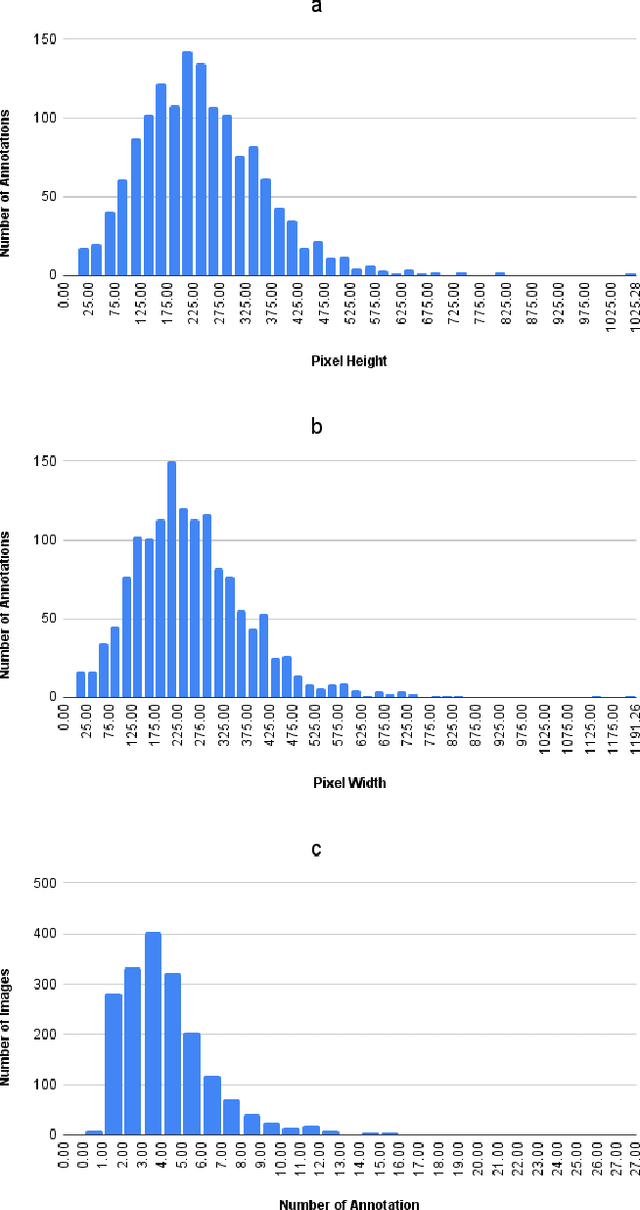
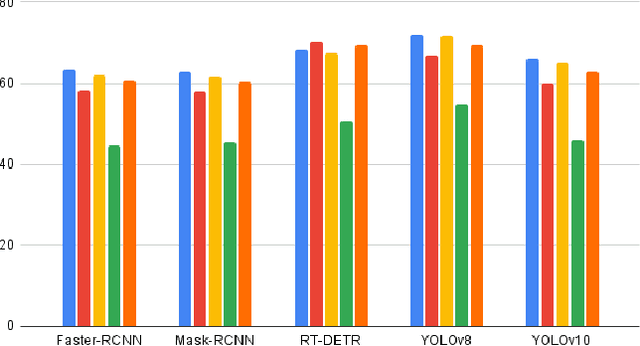
The future of the agriculture industry is intertwined with automation. Accurate fruit detection, yield estimation, and harvest time estimation are crucial for optimizing agricultural practices. These tasks can be carried out by robots to reduce labour costs and improve the efficiency of the process. To do so, deep learning models should be trained to perform knowledge-based tasks, which outlines the importance of contributing valuable data to the literature. In this paper, we introduce Raspberry PhenoSet, a phenology-based dataset designed for detecting and segmenting raspberry fruit across seven developmental stages. To the best of our knowledge, Raspberry PhenoSet is the first fruit dataset to integrate biology-based classification with fruit detection tasks, offering valuable insights for yield estimation and precise harvest timing. This dataset contains 1,853 high-resolution images, the highest quality in the literature, captured under controlled artificial lighting in a vertical farm. The dataset has a total of 6,907 instances of mask annotations, manually labelled to reflect the seven phenology stages. We have also benchmarked Raspberry PhenoSet using several state-of-the-art deep learning models, including YOLOv8, YOLOv10, RT-DETR, and Mask R-CNN, to provide a comprehensive evaluation of their performance on the dataset. Our results highlight the challenges of distinguishing subtle phenology stages and underscore the potential of Raspberry PhenoSet for both deep learning model development and practical robotic applications in agriculture, particularly in yield prediction and supply chain management. The dataset and the trained models are publicly available for future studies.
FG-PE: Factor-graph Approach for Multi-robot Pursuit-Evasion
Nov 01, 2024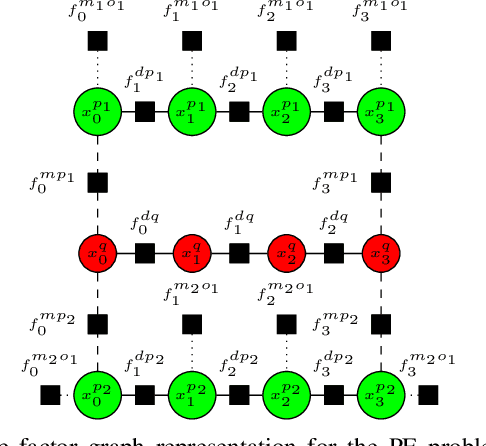
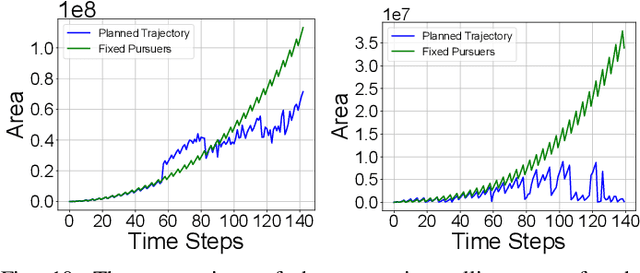
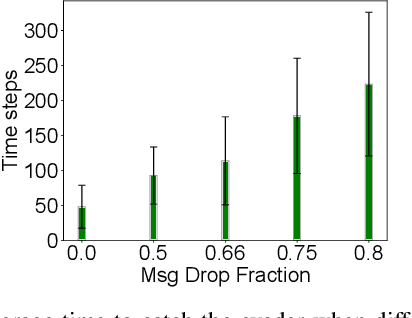
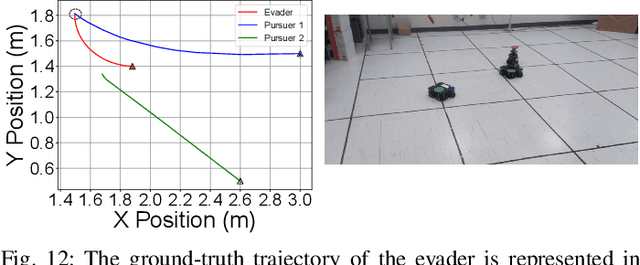
With the increasing use of robots in daily life, there is a growing need to provide robust collaboration protocols for robots to tackle more complicated and dynamic problems effectively. This paper presents a novel, factor graph-based approach to address the pursuit-evasion problem, enabling accurate estimation, planning, and tracking of an evader by multiple pursuers working together. It is assumed that there are multiple pursuers and only one evader in this scenario. The proposed method significantly improves the accuracy of evader estimation and tracking, allowing pursuers to capture the evader in the shortest possible time and distance compared to existing techniques. In addition to these primary objectives, the proposed approach effectively minimizes uncertainty while remaining robust, even when communication issues lead to some messages being dropped or lost. Through a series of comprehensive experiments, this paper demonstrates that the proposed algorithm consistently outperforms traditional pursuit-evasion methods across several key performance metrics, such as the time required to capture the evader and the average distance traveled by the pursuers. Additionally, the proposed method is tested in real-world hardware experiments, further validating its effectiveness and applicability.
Morphological Detection and Classification of Microplastics and Nanoplastics Emerged from Consumer Products by Deep Learning
Sep 20, 2024



Plastic pollution presents an escalating global issue, impacting health and environmental systems, with micro- and nanoplastics found across mediums from potable water to air. Traditional methods for studying these contaminants are labor-intensive and time-consuming, necessitating a shift towards more efficient technologies. In response, this paper introduces micro- and nanoplastics (MiNa), a novel and open-source dataset engineered for the automatic detection and classification of micro and nanoplastics using object detection algorithms. The dataset, comprising scanning electron microscopy images simulated under realistic aquatic conditions, categorizes plastics by polymer type across a broad size spectrum. We demonstrate the application of state-of-the-art detection algorithms on MiNa, assessing their effectiveness and identifying the unique challenges and potential of each method. The dataset not only fills a critical gap in available resources for microplastic research but also provides a robust foundation for future advancements in the field.
Inverse k-visibility for RSSI-based Indoor Geometric Mapping
Aug 14, 2024In recent years, the increased availability of WiFi in indoor environments has gained an interest in the robotics community to leverage WiFi signals for enhancing indoor SLAM (Simultaneous Localization and Mapping) systems. SLAM technology is widely used, especially for the navigation and control of autonomous robots. This paper discusses various works in developing WiFi-based localization and challenges in achieving high-accuracy geometric maps. This paper introduces the concept of inverse k-visibility developed from the k-visibility algorithm to identify the free space in an unknown environment for planning, navigation, and obstacle avoidance. Comprehensive experiments, including those utilizing single and multiple RSSI signals, were conducted in both simulated and real-world environments to demonstrate the robustness of the proposed algorithm. Additionally, a detailed analysis comparing the resulting maps with ground-truth Lidar-based maps is provided to highlight the algorithm's accuracy and reliability.
M^3RS: Multi-robot, Multi-objective, and Multi-mode Routing and Scheduling
Mar 24, 2024



In this paper, we present a novel problem coined multi-robot, multi-objective, and multi-mode routing and scheduling (M^3RS). The formulation for M^3RS is introduced for time-bound multi-robot, multi-objective routing and scheduling missions where each task has multiple execution modes. Different execution modes have distinct resource consumption, associated execution time, and quality. M^3RS assigns the optimal sequence of tasks and the execution modes to each agent. The routes and associated modes depend on user preferences for different objective criteria. The need for M^3RS comes from multi-robot applications in which a trade-off between multiple criteria arises from different task execution modes. We use M^3RS for the application of multi-robot disinfection in public locations. The objectives considered for disinfection application are disinfection quality and number of tasks completed. A mixed-integer linear programming model is proposed for M^3RS. Then, a time-efficient column generation scheme is presented to tackle the issue of computation times for larger problem instances. The advantage of using multiple modes over fixed execution mode is demonstrated using experiments on synthetic data. The results suggest that M^3RS provides flexibility to the user in terms of available solutions and performs well in joint performance metrics. The application of the proposed problem is shown for a team of disinfection robots.} The videos for the experiments are available on the project website: https://sites.google.com/view/g-robot/m3rs/ .
DPPE: Dense Pose Estimation in a Plenoxels Environment using Gradient Approximation
Mar 16, 2024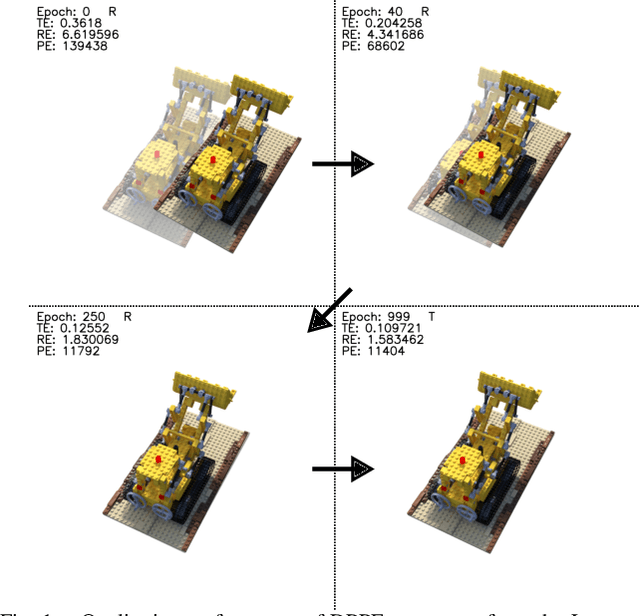
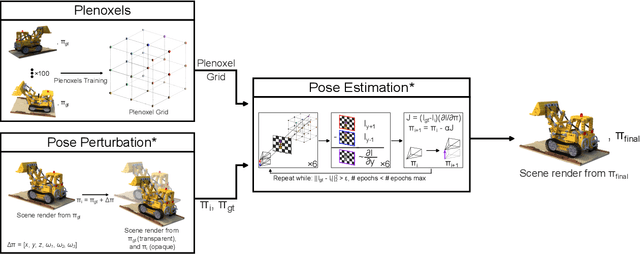
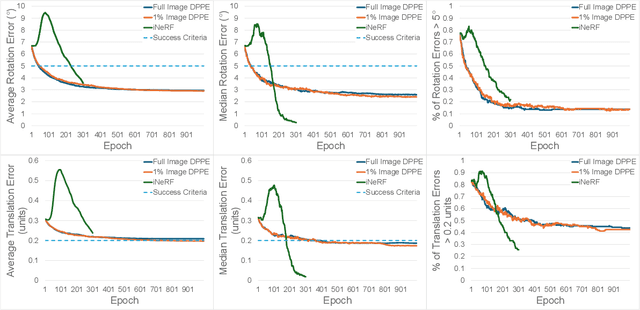
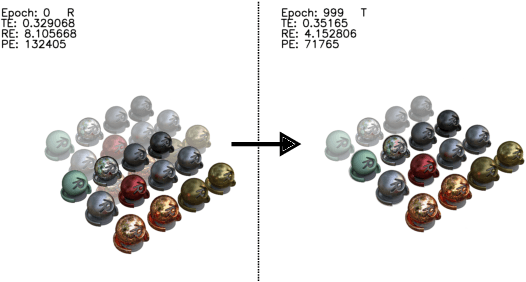
We present DPPE, a dense pose estimation algorithm that functions over a Plenoxels environment. Recent advances in neural radiance field techniques have shown that it is a powerful tool for environment representation. More recent neural rendering algorithms have significantly improved both training duration and rendering speed. Plenoxels introduced a fully-differentiable radiance field technique that uses Plenoptic volume elements contained in voxels for rendering, offering reduced training times and better rendering accuracy, while also eliminating the neural net component. In this work, we introduce a 6-DoF monocular RGB-only pose estimation procedure for Plenoxels, which seeks to recover the ground truth camera pose after a perturbation. We employ a variation on classical template matching techniques, using stochastic gradient descent to optimize the pose by minimizing errors in re-rendering. In particular, we examine an approach that takes advantage of the rapid rendering speed of Plenoxels to numerically approximate part of the pose gradient, using a central differencing technique. We show that such methods are effective in pose estimation. Finally, we perform ablations over key components of the problem space, with a particular focus on image subsampling and Plenoxel grid resolution. Project website: https://sites.google.com/view/dppe
Identifying Optimal Launch Sites of High-Altitude Latex-Balloons using Bayesian Optimisation for the Task of Station-Keeping
Mar 16, 2024



Station-keeping tasks for high-altitude balloons show promise in areas such as ecological surveys, atmospheric analysis, and communication relays. However, identifying the optimal time and position to launch a latex high-altitude balloon is still a challenging and multifaceted problem. For example, tasks such as forest fire tracking place geometric constraints on the launch location of the balloon. Furthermore, identifying the most optimal location also heavily depends on atmospheric conditions. We first illustrate how reinforcement learning-based controllers, frequently used for station-keeping tasks, can exploit the environment. This exploitation can degrade performance on unseen weather patterns and affect station-keeping performance when identifying an optimal launch configuration. Valuing all states equally in the region, the agent exploits the region's geometry by flying near the edge, leading to risky behaviours. We propose a modification which compensates for this exploitation and finds this leads to, on average, higher steps within the target region on unseen data. Then, we illustrate how Bayesian Optimisation (BO) can identify the optimal launch location to perform station-keeping tasks, maximising the expected undiscounted return from a given rollout. We show BO can find this launch location in fewer steps compared to other optimisation methods. Results indicate that, surprisingly, the most optimal location to launch from is not commonly within the target region. Please find further information about our project at https://sites.google.com/view/bo-lauch-balloon/.
Visual Inertial Odometry using Focal Plane Binary Features (BIT-VIO)
Mar 14, 2024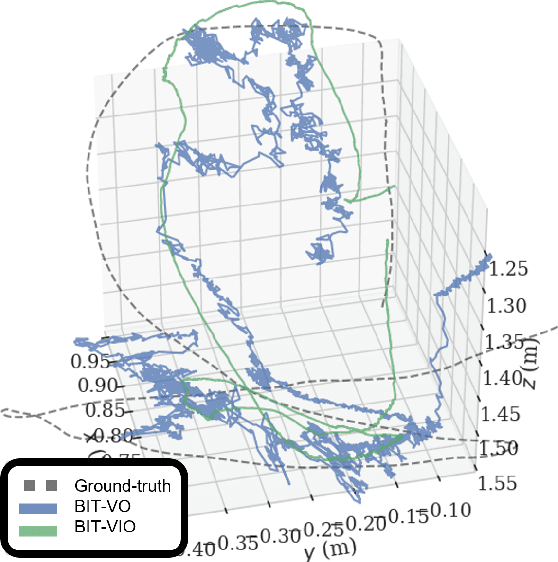
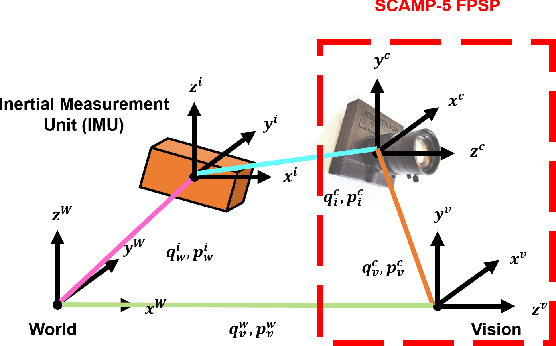
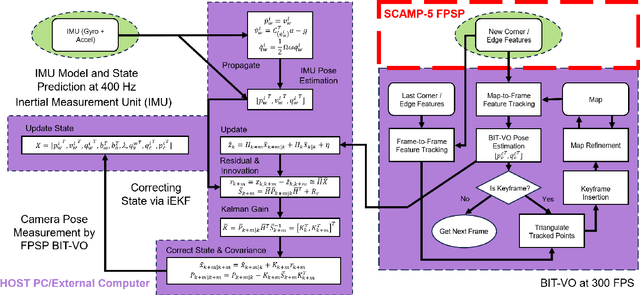
Focal-Plane Sensor-Processor Arrays (FPSP)s are an emerging technology that can execute vision algorithms directly on the image sensor. Unlike conventional cameras, FPSPs perform computation on the image plane -- at individual pixels -- enabling high frame rate image processing while consuming low power, making them ideal for mobile robotics. FPSPs, such as the SCAMP-5, use parallel processing and are based on the Single Instruction Multiple Data (SIMD) paradigm. In this paper, we present BIT-VIO, the first Visual Inertial Odometry (VIO) which utilises SCAMP-5.BIT-VIO is a loosely-coupled iterated Extended Kalman Filter (iEKF) which fuses together the visual odometry running fast at 300 FPS with predictions from 400 Hz IMU measurements to provide accurate and smooth trajectories.
Structure from WiFi (SfW): RSSI-based Geometric Mapping of Indoor Environments
Mar 04, 2024With the rising prominence of WiFi in common spaces, efforts have been made in the robotics community to take advantage of this fact by incorporating WiFi signal measurements in indoor SLAM (Simultaneous Localization and Mapping) systems. SLAM is essential in a wide range of applications, especially in the control of autonomous robots. This paper describes recent work in the development of WiFi-based localization and addresses the challenges currently faced in achieving WiFi-based geometric mapping. Inspired by the field of research into k-visibility, this paper presents the concept of inverse k-visibility and proposes a novel algorithm that allows robots to build a map of the free space of an unknown environment, essential for planning, navigation, and avoiding obstacles. Experiments performed in simulated and real-world environments demonstrate the effectiveness of the proposed algorithm.
Suspended Magnetometer Survey for Mineral Data Acquisition with Vertical Take-off and Landing Fixed-wing Aircraft
Feb 19, 2024



Multirotor Unmanned Aerial Vehicles (UAV)s have recently become an important instrument for collecting mineral data, enabling more effective and accurate geological investigations. This paper explores the difficulties in mounting high-sensitivity sensors on a UAV platform, including electromagnetic interference, payload dynamics, and maintaining stable sensor performance while in flight. It is highlighted how the specific solutions provided to deal with these problems have the potential to alter the collection of mineral data assisted by UAVs. The work also shows experimental findings that demonstrate the creative potential of these solutions in UAV-based mineral data collecting, leading to improvements in effective mineral exploration through careful design, testing, and assessment of these systems. These innovations resulted in a platform that is quickly deployable in remote areas and able to operate more efficiently compared to traditional multirotor UAVs while still producing equal or higher quality mineral data. This allows for much higher efficiency and lower operating costs for high-production UAV-based mineral data acquisition.