 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARC-Flow : Articulated, Resolution-Agnostic, Correspondence-Free Matching and Interpolation of 3D Shapes Under Flow Fields
Mar 04, 2025This work presents a unified framework for the unsupervised prediction of physically plausible interpolations between two 3D articulated shapes and the automatic estimation of dense correspondence between them. Interpolation is modelled as a diffeomorphic transformation using a smooth, time-varying flow field governed by Neural Ordinary Differential Equations (ODEs). This ensures topological consistency and non-intersecting trajectories while accommodating hard constraints, such as volume preservation, and soft constraints, \eg physical priors. Correspondence is recovered using an efficient Varifold formulation, that is effective on high-fidelity surfaces with differing parameterisations. By providing a simple skeleton for the source shape only, we impose physically motivated constraints on the deformation field and resolve symmetric ambiguities. This is achieved without relying on skinning weights or any prior knowledge of the skeleton's target pose configuration. Qualitative and quantitative results demonstrate competitive or superior performance over existing state-of-the-art approaches in both shape correspondence and interpolation tasks across standard datasets.
Identifying Optimal Launch Sites of High-Altitude Latex-Balloons using Bayesian Optimisation for the Task of Station-Keeping
Mar 16, 2024



Station-keeping tasks for high-altitude balloons show promise in areas such as ecological surveys, atmospheric analysis, and communication relays. However, identifying the optimal time and position to launch a latex high-altitude balloon is still a challenging and multifaceted problem. For example, tasks such as forest fire tracking place geometric constraints on the launch location of the balloon. Furthermore, identifying the most optimal location also heavily depends on atmospheric conditions. We first illustrate how reinforcement learning-based controllers, frequently used for station-keeping tasks, can exploit the environment. This exploitation can degrade performance on unseen weather patterns and affect station-keeping performance when identifying an optimal launch configuration. Valuing all states equally in the region, the agent exploits the region's geometry by flying near the edge, leading to risky behaviours. We propose a modification which compensates for this exploitation and finds this leads to, on average, higher steps within the target region on unseen data. Then, we illustrate how Bayesian Optimisation (BO) can identify the optimal launch location to perform station-keeping tasks, maximising the expected undiscounted return from a given rollout. We show BO can find this launch location in fewer steps compared to other optimisation methods. Results indicate that, surprisingly, the most optimal location to launch from is not commonly within the target region. Please find further information about our project at https://sites.google.com/view/bo-lauch-balloon/.
Aligned Multi-Task Gaussian Process
Oct 29, 2021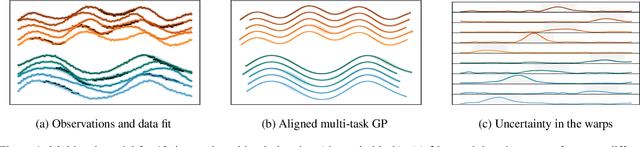
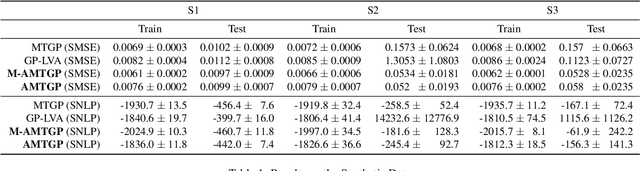
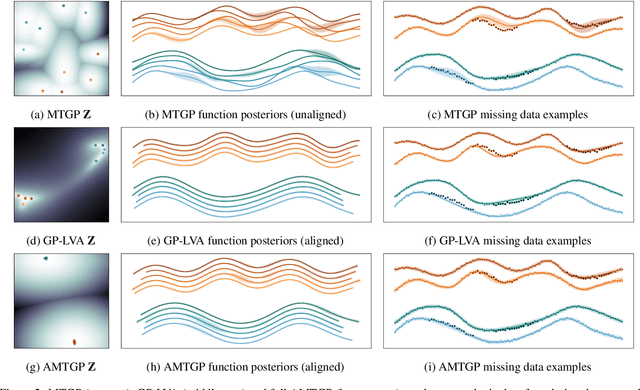
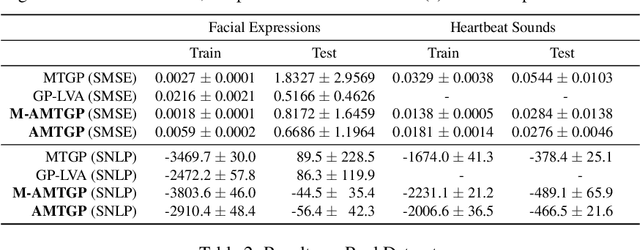
Multi-task learning requires accurate identification of the correlations between tasks. In real-world time-series, tasks are rarely perfectly temporally aligned; traditional multi-task models do not account for this and subsequent errors in correlation estimation will result in poor predictive performance and uncertainty quantification. We introduce a method that automatically accounts for temporal misalignment in a unified generative model that improves predictive performance. Our method uses Gaussian processes (GPs) to model the correlations both within and between the tasks. Building on the previous work by Kazlauskaiteet al. [2019], we include a separate monotonic warp of the input data to model temporal misalignment. In contrast to previous work, we formulate a lower bound that accounts for uncertainty in both the estimates of the warping process and the underlying functions. Also, our new take on a monotonic stochastic process, with efficient path-wise sampling for the warp functions, allows us to perform full Bayesian inference in the model rather than MAP estimates. Missing data experiments, on synthetic and real time-series, demonstrate the advantages of accounting for misalignments (vs standard unaligned method) as well as modelling the uncertainty in the warping process(vs baseline MAP alignment approach).