 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Inertial Odometry using Focal Plane Binary Features (BIT-VIO)
Paper and Code
Mar 14, 2024
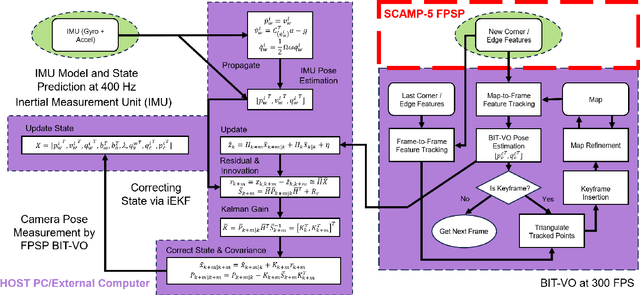
Focal-Plane Sensor-Processor Arrays (FPSP)s are an emerging technology that can execute vision algorithms directly on the image sensor. Unlike conventional cameras, FPSPs perform computation on the image plane -- at individual pixels -- enabling high frame rate image processing while consuming low power, making them ideal for mobile robotics. FPSPs, such as the SCAMP-5, use parallel processing and are based on the Single Instruction Multiple Data (SIMD) paradigm. In this paper, we present BIT-VIO, the first Visual Inertial Odometry (VIO) which utilises SCAMP-5.BIT-VIO is a loosely-coupled iterated Extended Kalman Filter (iEKF) which fuses together the visual odometry running fast at 300 FPS with predictions from 400 Hz IMU measurements to provide accurate and smooth trajectories.