 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse k-visibility for RSSI-based Indoor Geometric Mapping
Aug 14, 2024In recent years, the increased availability of WiFi in indoor environments has gained an interest in the robotics community to leverage WiFi signals for enhancing indoor SLAM (Simultaneous Localization and Mapping) systems. SLAM technology is widely used, especially for the navigation and control of autonomous robots. This paper discusses various works in developing WiFi-based localization and challenges in achieving high-accuracy geometric maps. This paper introduces the concept of inverse k-visibility developed from the k-visibility algorithm to identify the free space in an unknown environment for planning, navigation, and obstacle avoidance. Comprehensive experiments, including those utilizing single and multiple RSSI signals, were conducted in both simulated and real-world environments to demonstrate the robustness of the proposed algorithm. Additionally, a detailed analysis comparing the resulting maps with ground-truth Lidar-based maps is provided to highlight the algorithm's accuracy and reliability.
M^3RS: Multi-robot, Multi-objective, and Multi-mode Routing and Scheduling
Mar 24, 2024



In this paper, we present a novel problem coined multi-robot, multi-objective, and multi-mode routing and scheduling (M^3RS). The formulation for M^3RS is introduced for time-bound multi-robot, multi-objective routing and scheduling missions where each task has multiple execution modes. Different execution modes have distinct resource consumption, associated execution time, and quality. M^3RS assigns the optimal sequence of tasks and the execution modes to each agent. The routes and associated modes depend on user preferences for different objective criteria. The need for M^3RS comes from multi-robot applications in which a trade-off between multiple criteria arises from different task execution modes. We use M^3RS for the application of multi-robot disinfection in public locations. The objectives considered for disinfection application are disinfection quality and number of tasks completed. A mixed-integer linear programming model is proposed for M^3RS. Then, a time-efficient column generation scheme is presented to tackle the issue of computation times for larger problem instances. The advantage of using multiple modes over fixed execution mode is demonstrated using experiments on synthetic data. The results suggest that M^3RS provides flexibility to the user in terms of available solutions and performs well in joint performance metrics. The application of the proposed problem is shown for a team of disinfection robots.} The videos for the experiments are available on the project website: https://sites.google.com/view/g-robot/m3rs/ .
Visual Inertial Odometry using Focal Plane Binary Features (BIT-VIO)
Mar 14, 2024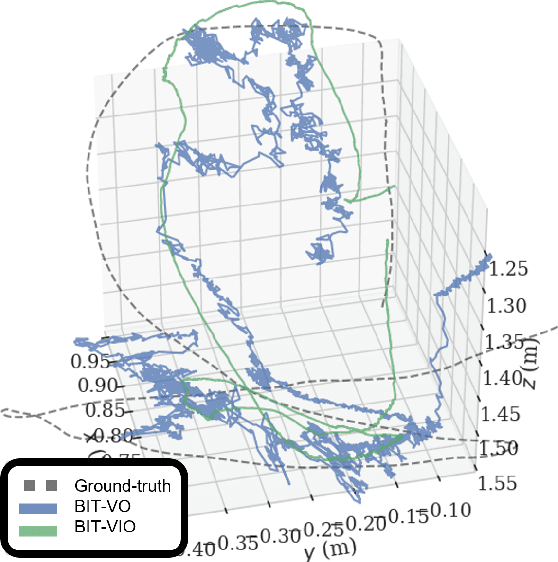
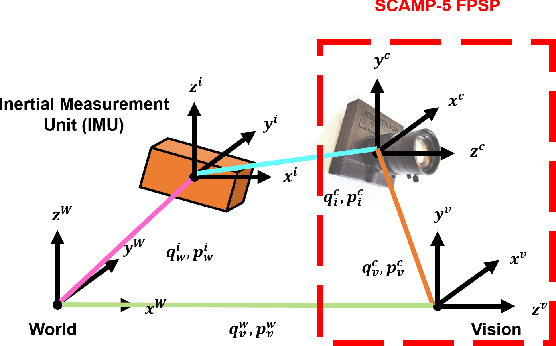
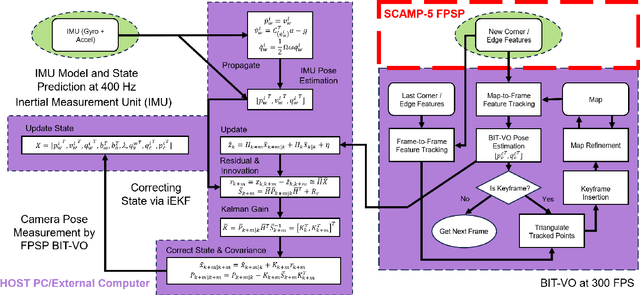
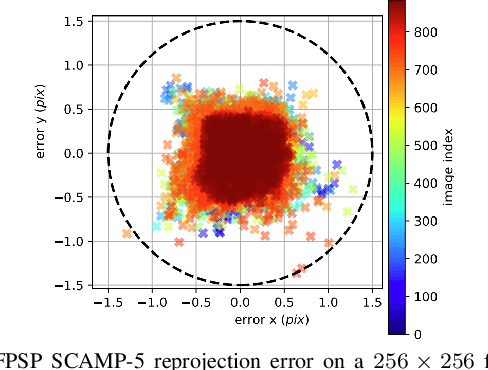
Focal-Plane Sensor-Processor Arrays (FPSP)s are an emerging technology that can execute vision algorithms directly on the image sensor. Unlike conventional cameras, FPSPs perform computation on the image plane -- at individual pixels -- enabling high frame rate image processing while consuming low power, making them ideal for mobile robotics. FPSPs, such as the SCAMP-5, use parallel processing and are based on the Single Instruction Multiple Data (SIMD) paradigm. In this paper, we present BIT-VIO, the first Visual Inertial Odometry (VIO) which utilises SCAMP-5.BIT-VIO is a loosely-coupled iterated Extended Kalman Filter (iEKF) which fuses together the visual odometry running fast at 300 FPS with predictions from 400 Hz IMU measurements to provide accurate and smooth trajectories.
Structure from WiFi (SfW): RSSI-based Geometric Mapping of Indoor Environments
Mar 04, 2024With the rising prominence of WiFi in common spaces, efforts have been made in the robotics community to take advantage of this fact by incorporating WiFi signal measurements in indoor SLAM (Simultaneous Localization and Mapping) systems. SLAM is essential in a wide range of applications, especially in the control of autonomous robots. This paper describes recent work in the development of WiFi-based localization and addresses the challenges currently faced in achieving WiFi-based geometric mapping. Inspired by the field of research into k-visibility, this paper presents the concept of inverse k-visibility and proposes a novel algorithm that allows robots to build a map of the free space of an unknown environment, essential for planning, navigation, and avoiding obstacles. Experiments performed in simulated and real-world environments demonstrate the effectiveness of the proposed algorithm.