 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging LSTM for Predictive Modeling of Satellite Clock Bias
Nov 11, 2024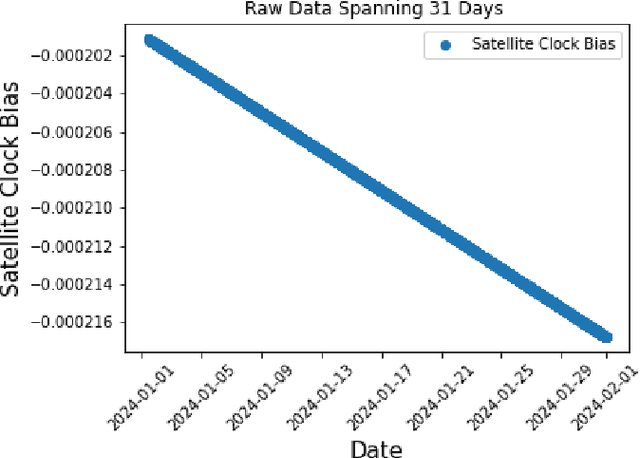
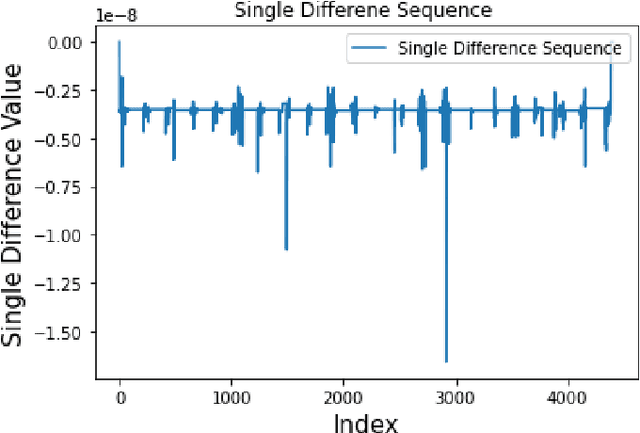
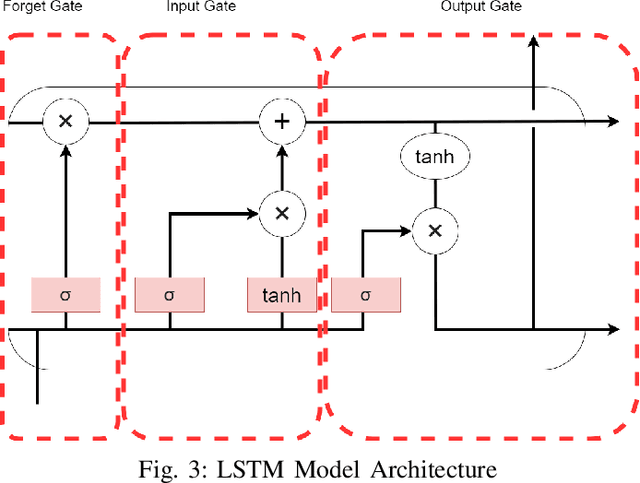
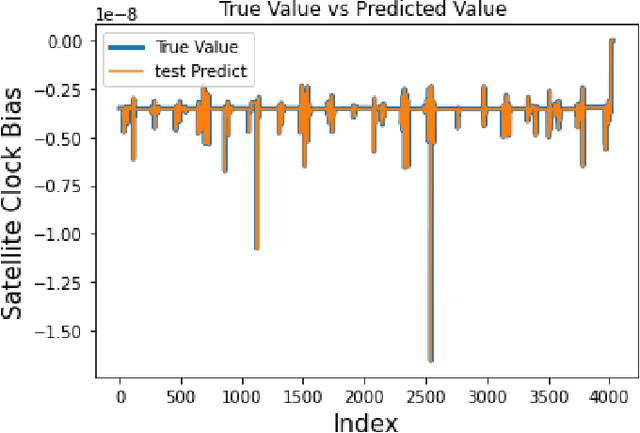
Satellite clock bias prediction plays a crucial role in enhancing the accuracy of satellite navigation systems. In this paper, we propose an approach utilizing Long Short-Term Memory (LSTM) networks to predict satellite clock bias. We gather data from the PRN 8 satellite of the Galileo and preprocess it to obtain a single difference sequence, crucial for normalizing the data. Normalization allows resampling of the data, ensuring that the predictions are equidistant and complete. Our methodology involves training the LSTM model on varying lengths of datasets, ranging from 7 days to 31 days. We employ a training set consisting of two days' worth of data in each case. Our LSTM model exhibits exceptional accuracy, with a Root Mean Square Error (RMSE) of 2.11 $\times$ 10$^{-11}$. Notably, our approach outperforms traditional methods used for similar time-series forecasting projects, being 170 times more accurate than RNN, 2.3 $\times$ 10$^7$ times more accurate than MLP, and 1.9 $\times$ 10$^4$ times more accurate than ARIMA. This study holds significant potential in enhancing the accuracy and efficiency of low-power receivers used in various devices, particularly those requiring power conservation. By providing more accurate predictions of satellite clock bias, the findings of this research can be integrated into the algorithms of such devices, enabling them to function with heightened precision while conserving power. Improved accuracy in clock bias predictions ensures that low-power receivers can maintain optimal performance levels, thereby enhancing the overall reliability and effectiveness of satellite navigation systems. Consequently, this advancement holds promise for a wide range of applications, including remote areas, IoT devices, wearable technology, and other devices where power efficiency and navigation accuracy are paramount.
Morphological Detection and Classification of Microplastics and Nanoplastics Emerged from Consumer Products by Deep Learning
Sep 20, 2024



Plastic pollution presents an escalating global issue, impacting health and environmental systems, with micro- and nanoplastics found across mediums from potable water to air. Traditional methods for studying these contaminants are labor-intensive and time-consuming, necessitating a shift towards more efficient technologies. In response, this paper introduces micro- and nanoplastics (MiNa), a novel and open-source dataset engineered for the automatic detection and classification of micro and nanoplastics using object detection algorithms. The dataset, comprising scanning electron microscopy images simulated under realistic aquatic conditions, categorizes plastics by polymer type across a broad size spectrum. We demonstrate the application of state-of-the-art detection algorithms on MiNa, assessing their effectiveness and identifying the unique challenges and potential of each method. The dataset not only fills a critical gap in available resources for microplastic research but also provides a robust foundation for future advancements in the field.
M^3RS: Multi-robot, Multi-objective, and Multi-mode Routing and Scheduling
Mar 24, 2024



In this paper, we present a novel problem coined multi-robot, multi-objective, and multi-mode routing and scheduling (M^3RS). The formulation for M^3RS is introduced for time-bound multi-robot, multi-objective routing and scheduling missions where each task has multiple execution modes. Different execution modes have distinct resource consumption, associated execution time, and quality. M^3RS assigns the optimal sequence of tasks and the execution modes to each agent. The routes and associated modes depend on user preferences for different objective criteria. The need for M^3RS comes from multi-robot applications in which a trade-off between multiple criteria arises from different task execution modes. We use M^3RS for the application of multi-robot disinfection in public locations. The objectives considered for disinfection application are disinfection quality and number of tasks completed. A mixed-integer linear programming model is proposed for M^3RS. Then, a time-efficient column generation scheme is presented to tackle the issue of computation times for larger problem instances. The advantage of using multiple modes over fixed execution mode is demonstrated using experiments on synthetic data. The results suggest that M^3RS provides flexibility to the user in terms of available solutions and performs well in joint performance metrics. The application of the proposed problem is shown for a team of disinfection robots.} The videos for the experiments are available on the project website: https://sites.google.com/view/g-robot/m3rs/ .
Pareto Frontier Approximation Network (PA-Net) to Solve Bi-objective TSP
Mar 03, 2022



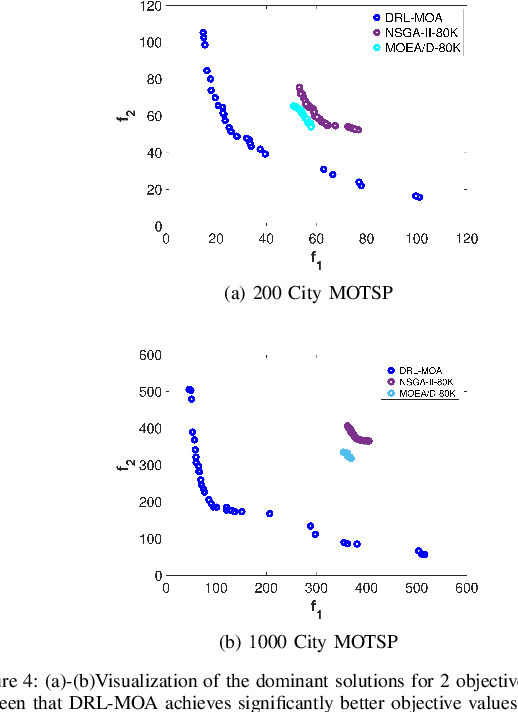
Travelling salesperson problem (TSP) is a classic resource allocation problem used to find an optimal order of doing a set of tasks while minimizing (or maximizing) an associated objective function. It is widely used in robotics for applications such as planning, scheduling etc. In this work, we solve TSP for two objectives using reinforcement learning. Often in multi objective optimization problems, the associated objective functions can be conflicting in nature. In such cases, the optimality is defined in terms of Pareto optimality. A set of these Pareto Optimal solutions in the objective space form a Pareto front (or frontier). Each solution has its own trade off. In this work, we present PA-Net, a network that generates good approximations of the Pareto front for the bi-objective travelling salesperson problem (BTSP). Firstly, BTSP is converted into a constrained optimization problem. We then train our network to solve this constrained problem using the Lagrangian relaxation and policy gradient. With PA-Net we are able to generate good quality Pareto fronts with fast inference times. Finally, we present the application of PA-Net to find optimal visiting order in a robotic navigation task/coverage planning.
Far-UVC Disinfection with Robotic Mobile Manipulator
Mar 02, 2022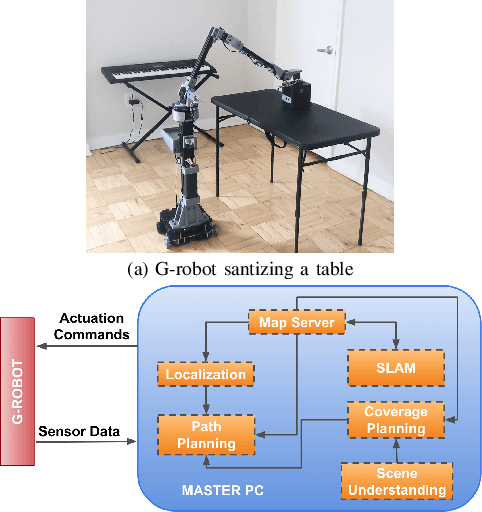
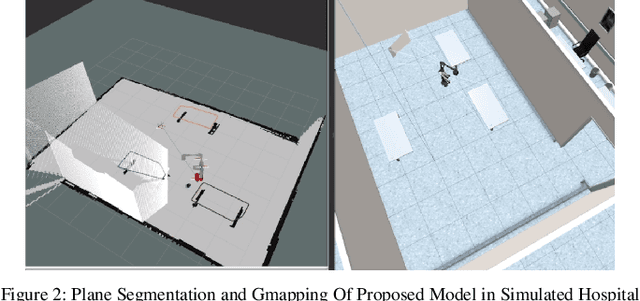
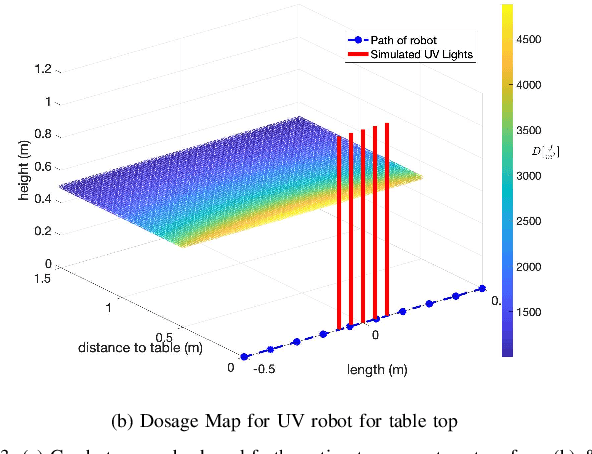
The COVID-19 pandemic has demonstrated the need for a more effective and efficient disinfection approach to combat infectious diseases. Ultraviolet germicidal irradiation (UVGI) is a proven mean for disinfection and sterilization and has been integrated into handheld devices and autonomous mobile robots. Existing UVGI robots which are commonly equipped with uncovered lamps that emit intense ultraviolet radiation suffer from: inability to be used in human presence, shadowing of objects, and long disinfection time. These robots also have a high operational cost. This paper introduces a cost-effective germicidal system that utilizes UVGI to disinfect pathogens, such as viruses, bacteria, and fungi, on high contact surfaces (e.g. doors and tables). This system is composed of a team of 5-DOF mobile manipulators with end-effectors that are equipped with far-UVC excimer lamps. The design of the system is discussed with emphasis on path planning, coverage planning, and scene understanding. Evaluations of the UVGI system using simulations and irradiance models are also included.
* Paper accepted at ISMR 2022