 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFar-UVC Disinfection with Robotic Mobile Manipulator
Mar 02, 2022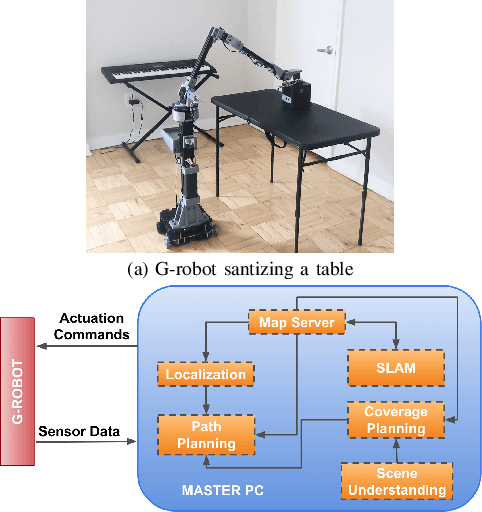
The COVID-19 pandemic has demonstrated the need for a more effective and efficient disinfection approach to combat infectious diseases. Ultraviolet germicidal irradiation (UVGI) is a proven mean for disinfection and sterilization and has been integrated into handheld devices and autonomous mobile robots. Existing UVGI robots which are commonly equipped with uncovered lamps that emit intense ultraviolet radiation suffer from: inability to be used in human presence, shadowing of objects, and long disinfection time. These robots also have a high operational cost. This paper introduces a cost-effective germicidal system that utilizes UVGI to disinfect pathogens, such as viruses, bacteria, and fungi, on high contact surfaces (e.g. doors and tables). This system is composed of a team of 5-DOF mobile manipulators with end-effectors that are equipped with far-UVC excimer lamps. The design of the system is discussed with emphasis on path planning, coverage planning, and scene understanding. Evaluations of the UVGI system using simulations and irradiance models are also included.
* Paper accepted at ISMR 2022
RL-PGO: Reinforcement Learning-based Planar Pose-Graph Optimization
Feb 26, 2022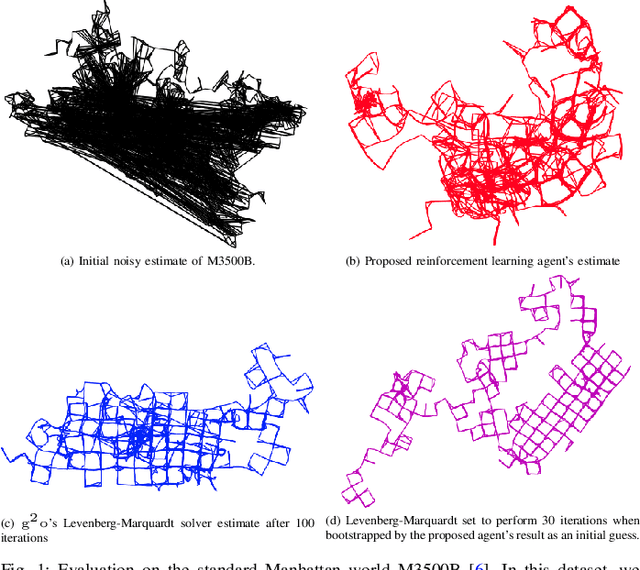
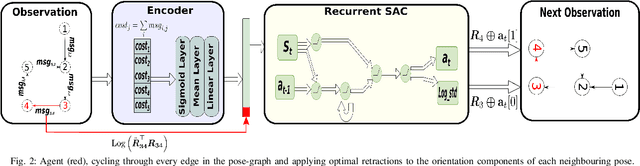
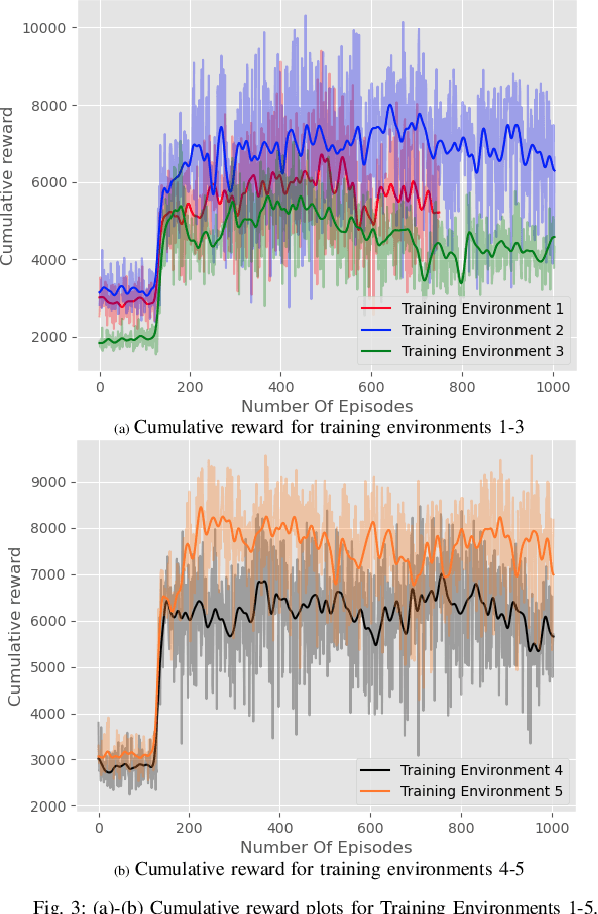
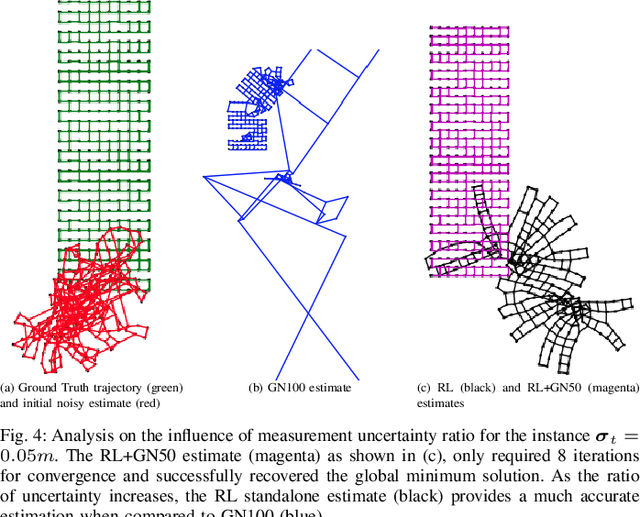
The objective of pose SLAM or pose-graph optimization (PGO) is to estimate the trajectory of a robot given odometric and loop closing constraints. State-of-the-art iterative approaches typically involve the linearization of a non-convex objective function and then repeatedly solve a set of normal equations. Furthermore, these methods may converge to a local minima yielding sub-optimal results. In this work, we present to the best of our knowledge the first Deep Reinforcement Learning (DRL) based environment and proposed agent for 2D pose-graph optimization. We demonstrate that the pose-graph optimization problem can be modeled as a partially observable Markov Decision Process and evaluate performance on real-world and synthetic datasets. The proposed agent outperforms state-of-the-art solver g2o on challenging instances where traditional nonlinear least-squares techniques may fail or converge to unsatisfactory solutions. Experimental results indicate that iterative-based solvers bootstrapped with the proposed approach allow for significantly higher quality estimations. We believe that reinforcement learning-based PGO is a promising avenue to further accelerate research towards globally optimal algorithms. Thus, our work paves the way to new optimization strategies in the 2D pose SLAM domain.