 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphological Detection and Classification of Microplastics and Nanoplastics Emerged from Consumer Products by Deep Learning
Sep 20, 2024



Plastic pollution presents an escalating global issue, impacting health and environmental systems, with micro- and nanoplastics found across mediums from potable water to air. Traditional methods for studying these contaminants are labor-intensive and time-consuming, necessitating a shift towards more efficient technologies. In response, this paper introduces micro- and nanoplastics (MiNa), a novel and open-source dataset engineered for the automatic detection and classification of micro and nanoplastics using object detection algorithms. The dataset, comprising scanning electron microscopy images simulated under realistic aquatic conditions, categorizes plastics by polymer type across a broad size spectrum. We demonstrate the application of state-of-the-art detection algorithms on MiNa, assessing their effectiveness and identifying the unique challenges and potential of each method. The dataset not only fills a critical gap in available resources for microplastic research but also provides a robust foundation for future advancements in the field.
MR.CAP: Multi-Robot Joint Control and Planning for Object Transport
Jan 22, 2024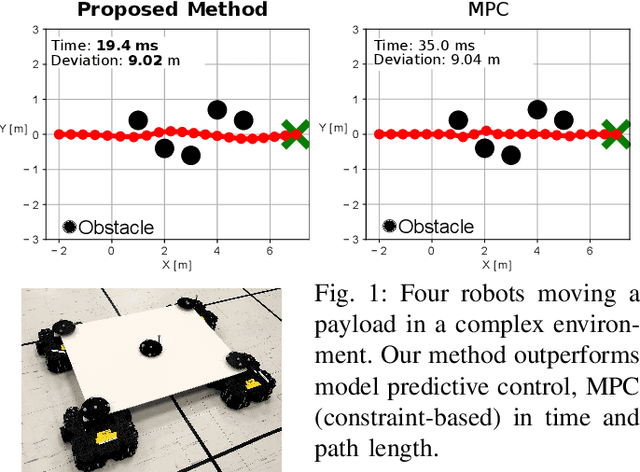
With the recent influx in demand for multi-robot systems throughout industry and academia, there is an increasing need for faster, robust, and generalizable path planning algorithms. Similarly, given the inherent connection between control algorithms and multi-robot path planners, there is in turn an increased demand for fast, efficient, and robust controllers. We propose a scalable joint path planning and control algorithm for multi-robot systems with constrained behaviours based on factor graph optimization. We demonstrate our algorithm on a series of hardware and simulated experiments. Our algorithm is consistently able to recover from disturbances and avoid obstacles while outperforming state-of-the-art methods in optimization time, path deviation, and inter-robot errors. See the code and supplementary video for experiments.