 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning and Controlled Crash Landing of a Quadcopter in case of a Rotor Failure
Sep 25, 2018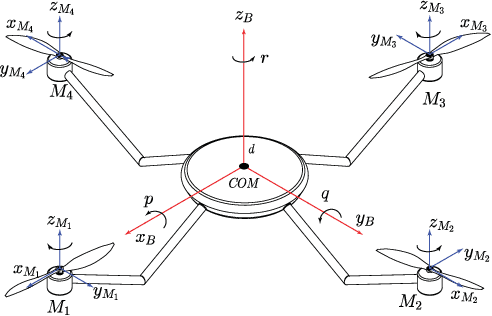
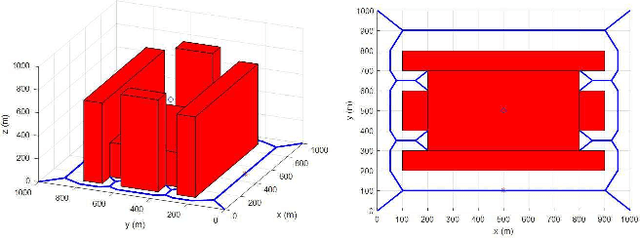
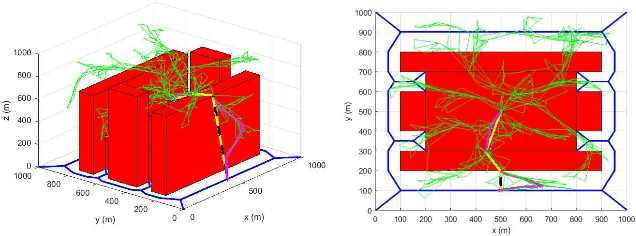
This paper presents a framework for controlled emergency landing of a quadcopter, experiencing a rotor failure, away from sensitive areas. A complete mathematical model capturing the dynamics of the system is presented that takes the asymmetrical aerodynamic load on the propellers into account. An equilibrium state of the system is calculated around which a linear time-invariant control strategy is developed to stabilize the system. By utilizing the proposed model, a specific configuration for a quadcopter is introduced that leads to the minimum power consumption during a yaw-rate-resolved hovering after a rotor failure. Furthermore, given a 3D representation of the environment, an optimal flight trajectory towards a safe crash landing spot, while avoiding collision with obstacles, is developed using an RRT* approach. The cost function for determining the best landing spot consists of: (i) finding the safest landing spot with the largest clearance from the obstacles; and (ii) finding the most energy-efficient trajectory towards the landing spot. The performance of the proposed framework is tested via simulations.
Optimal-power Configurations for Hover Solutions in Mono-spinners
Apr 12, 2018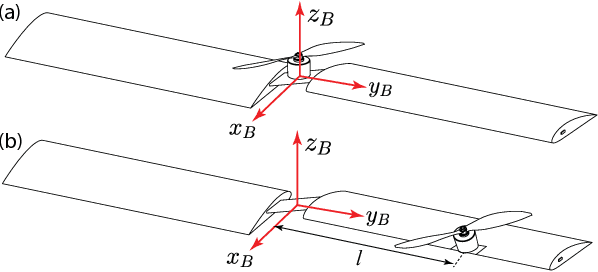
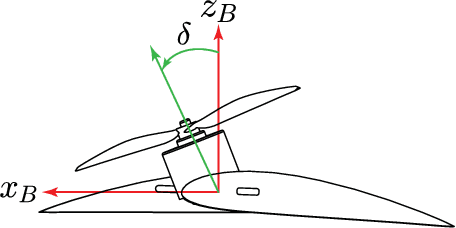


Rotary-wing flying machines draw attention within the UAV community for their in-place hovering capability, and recently, holonomic motion over fixed-wings. However, they still fall behind in terms of the flight time, power consumption, and safety for centrally-powered and redundant multi-copters have been suggested and studied. In this paper, we investigate about the power-optimality in a mono-spinner, i.e., a class of rotary-wing UAVs with one rotor only, whose main body has a streamlined shape for producing additional lift when counter-spinning the rotor. We provide a detailed dynamic model of our mono-spinner. Two configurations are studied: (1) a symmetric configuration, in which the rotor is aligned with the fuselage's COM, and (2) an asymmetric configuration, in which the rotor is located with an offset from the fuselage's COM. While the former can generate an in-place hovering flight condition, the latter can achieve trajectory tacking in 3D space by resolving the yaw and precession rates. Furthermore, it is shown that by introducing a tilting angle between the rotor and the fuselage, within the asymmetric design, one can further minimize the power consumption without compromising the overall stability. It is shown that an energy optimal solution can be achieved through proper aerodynamic design of the mono-spinner for the first time.
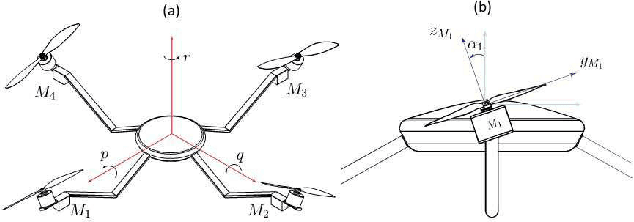
A Unified Approach to Configuration-based Dynamic Analysis of Quadcopters for Optimal Stability
Sep 22, 2017



A special type of rotary-wing Unmanned Aerial Vehicles (UAV), called Quadcopter have prevailed to the civilian use for the past decade. They have gained significant amount of attention within the UAV community for their redundancy and ease of control, despite the fact that they fall under an under-actuated system category. They come in a variety of configurations. The "+" and "x" configurations were introduced first. Literature pertinent to these two configurations is vast. However, in this paper, we define 6 additional possible configurations for a Quadcopter that can be built under either "+" or "x" setup. These configurations can be achieved by changing the angle that the axis of rotation for rotors make with the main body, i.e., fuselage. This would also change the location of the COM with respect to the propellers which can add to the overall stability. A comprehensive dynamic model for all these configurations is developed for the first time. The overall stability for these configurations are addressed. In particular, it is shown that one configuration can lead to the most statically-stable platform by adopting damping motion in Roll/Pitch/Yaw, which is described for the first time to the best of our knowledge.