 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal-power Configurations for Hover Solutions in Mono-spinners
Paper and Code
Apr 12, 2018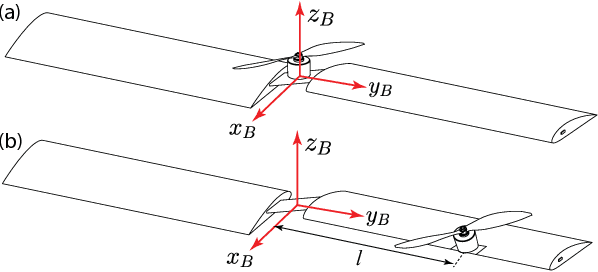
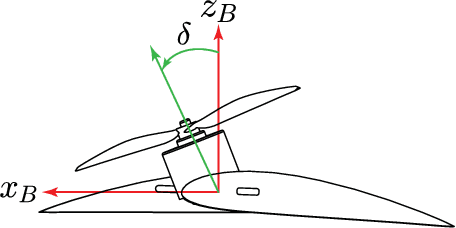


Rotary-wing flying machines draw attention within the UAV community for their in-place hovering capability, and recently, holonomic motion over fixed-wings. However, they still fall behind in terms of the flight time, power consumption, and safety for centrally-powered and redundant multi-copters have been suggested and studied. In this paper, we investigate about the power-optimality in a mono-spinner, i.e., a class of rotary-wing UAVs with one rotor only, whose main body has a streamlined shape for producing additional lift when counter-spinning the rotor. We provide a detailed dynamic model of our mono-spinner. Two configurations are studied: (1) a symmetric configuration, in which the rotor is aligned with the fuselage's COM, and (2) an asymmetric configuration, in which the rotor is located with an offset from the fuselage's COM. While the former can generate an in-place hovering flight condition, the latter can achieve trajectory tacking in 3D space by resolving the yaw and precession rates. Furthermore, it is shown that by introducing a tilting angle between the rotor and the fuselage, within the asymmetric design, one can further minimize the power consumption without compromising the overall stability. It is shown that an energy optimal solution can be achieved through proper aerodynamic design of the mono-spinner for the first time.