 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning and Controlled Crash Landing of a Quadcopter in case of a Rotor Failure
Paper and Code
Sep 25, 2018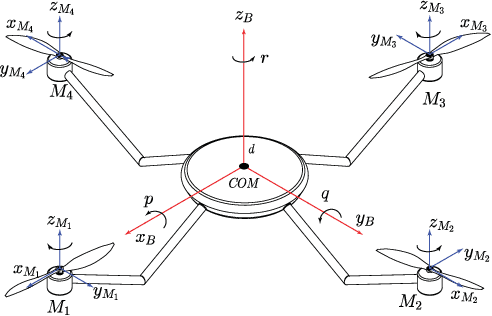
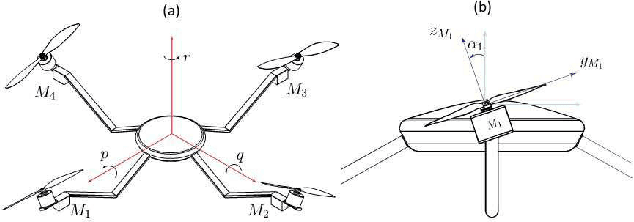
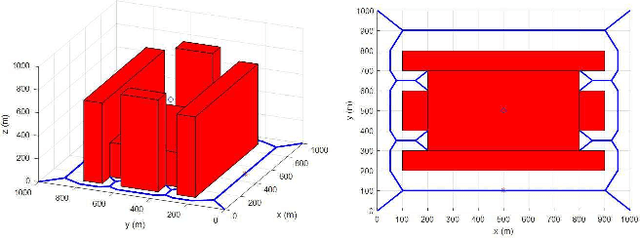
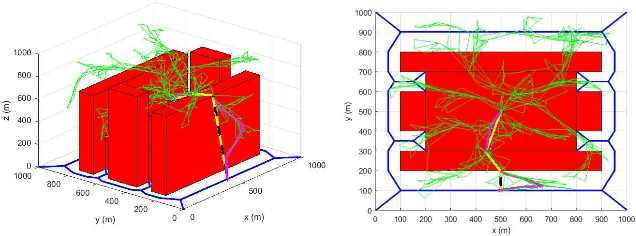
This paper presents a framework for controlled emergency landing of a quadcopter, experiencing a rotor failure, away from sensitive areas. A complete mathematical model capturing the dynamics of the system is presented that takes the asymmetrical aerodynamic load on the propellers into account. An equilibrium state of the system is calculated around which a linear time-invariant control strategy is developed to stabilize the system. By utilizing the proposed model, a specific configuration for a quadcopter is introduced that leads to the minimum power consumption during a yaw-rate-resolved hovering after a rotor failure. Furthermore, given a 3D representation of the environment, an optimal flight trajectory towards a safe crash landing spot, while avoiding collision with obstacles, is developed using an RRT* approach. The cost function for determining the best landing spot consists of: (i) finding the safest landing spot with the largest clearance from the obstacles; and (ii) finding the most energy-efficient trajectory towards the landing spot. The performance of the proposed framework is tested via simulations.