 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Visual Servoing of an Aerial Robot Using Keypoint Feature Extraction
Paper and Code
Mar 29, 2025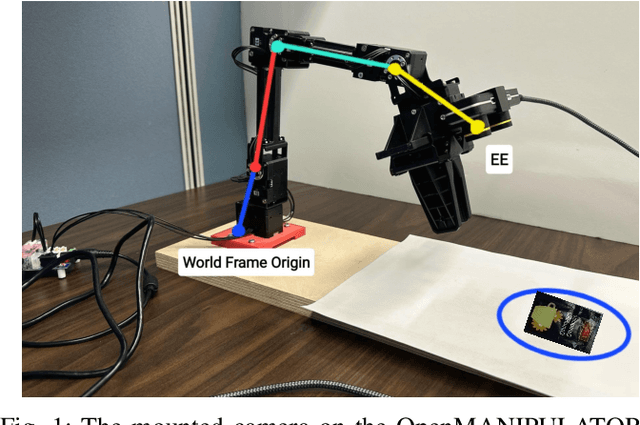
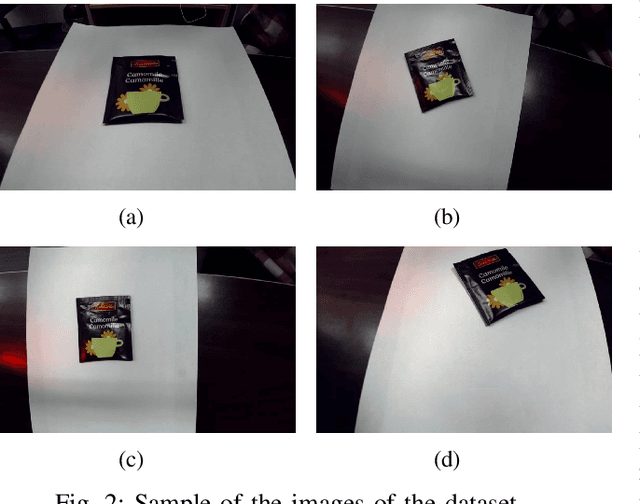
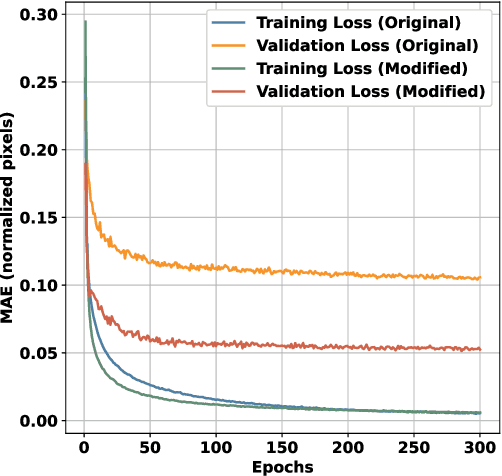
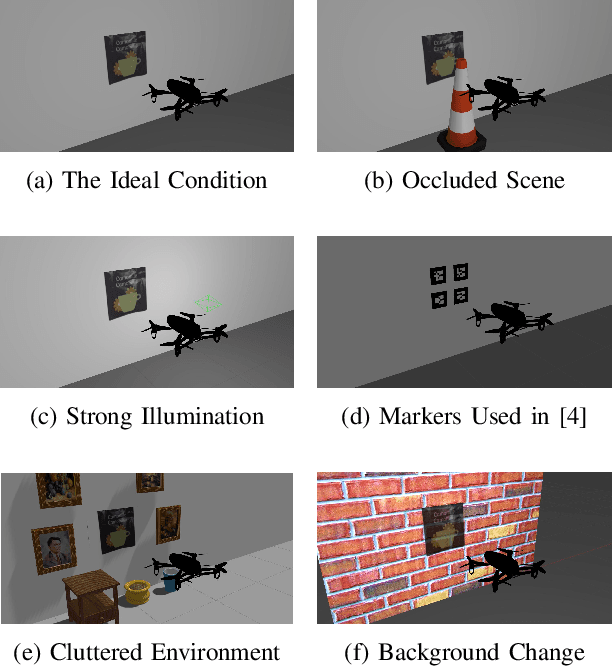
The problem of image-based visual servoing (IBVS) of an aerial robot using deep-learning-based keypoint detection is addressed in this article. A monocular RGB camera mounted on the platform is utilized to collect the visual data. A convolutional neural network (CNN) is then employed to extract the features serving as the visual data for the servoing task. This paper contributes to the field by circumventing not only the challenge stemming from the need for man-made marker detection in conventional visual servoing techniques, but also enhancing the robustness against undesirable factors including occlusion, varying illumination, clutter, and background changes, thereby broadening the applicability of perception-guided motion control tasks in aerial robots. Additionally, extensive physics-based ROS Gazebo simulations are conducted to assess the effectiveness of this method, in contrast to many existing studies that rely solely on physics-less simulations. A demonstration video is available at https://youtu.be/Dd2Her8Ly-E.