 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrowdSurfer: Sampling Optimization Augmented with Vector-Quantized Variational AutoEncoder for Dense Crowd Navigation
Sep 24, 2024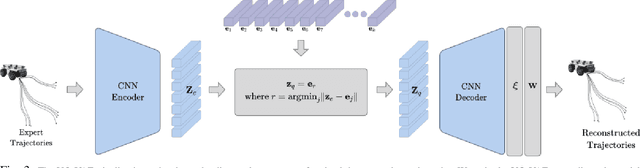
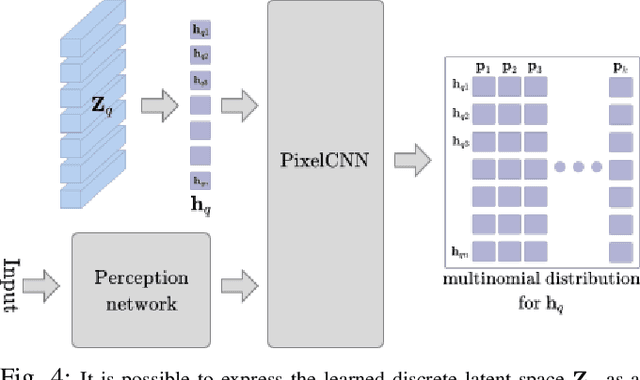
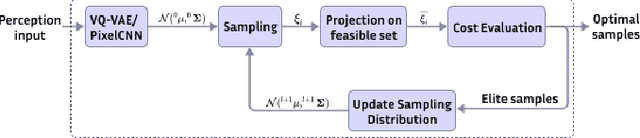
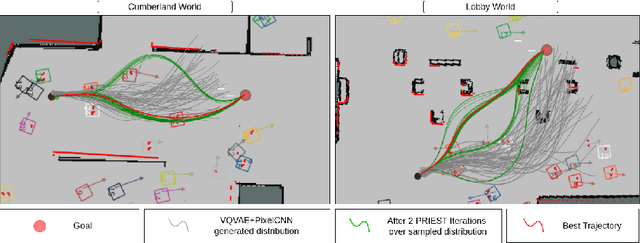
Navigation amongst densely packed crowds remains a challenge for mobile robots. The complexity increases further if the environment layout changes, making the prior computed global plan infeasible. In this paper, we show that it is possible to dramatically enhance crowd navigation by just improving the local planner. Our approach combines generative modelling with inference time optimization to generate sophisticated long-horizon local plans at interactive rates. More specifically, we train a Vector Quantized Variational AutoEncoder to learn a prior over the expert trajectory distribution conditioned on the perception input. At run-time, this is used as an initialization for a sampling-based optimizer for further refinement. Our approach does not require any sophisticated prediction of dynamic obstacles and yet provides state-of-the-art performance. In particular, we compare against the recent DRL-VO approach and show a 40% improvement in success rate and a 6% improvement in travel time.
Towards reliable real-time trajectory optimization
Aug 20, 2024



Motion planning is a key aspect of robotics. A common approach to address motion planning problems is trajectory optimization. Trajectory optimization can represent the high-level behaviors of robots through mathematical formulations. However, current trajectory optimization approaches have two main challenges. Firstly, their solution heavily depends on the initial guess, and they are prone to get stuck in local minima. Secondly, they face scalability limitations by increasing the number of constraints. This thesis endeavors to tackle these challenges by introducing four innovative trajectory optimization algorithms to improve reliability, scalability, and computational efficiency. There are two novel aspects of the proposed algorithms. The first key innovation is remodeling the kinematic constraints and collision avoidance constraints. Another key innovation lies in the design of algorithms that effectively utilize parallel computation on GPU accelerators. By using reformulated constraints and leveraging the computational power of GPUs, the proposed algorithms of this thesis demonstrate significant improvements in efficiency and scalability compared to the existing methods. Parallelization enables faster computation times, allowing for real-time decision-making in dynamic environments. Moreover, the algorithms are designed to adapt to changes in the environment, ensuring robust performance. Extensive benchmarking for each proposed optimizer validates their efficacy. Overall, this thesis makes a significant contribution to the field of trajectory optimization algorithms. It introduces innovative solutions that specifically address the challenges faced by existing methods. The proposed algorithms pave the way for more efficient and robust motion planning solutions in robotics by leveraging parallel computation and specific mathematical structures.
PRIEST: Projection Guided Sampling-Based Optimization For Autonomous Navigation
Sep 15, 2023



Efficient navigation in unknown and dynamic environments is crucial for expanding the application domain of mobile robots. The core challenge stems from the nonavailability of a feasible global path for guiding optimization-based local planners. As a result, existing local planners often get trapped in poor local minima. In this paper, we present a novel optimizer that can explore multiple homotopies to plan high-quality trajectories over long horizons while still being fast enough for real-time applications. We build on the gradient-free paradigm by augmenting the trajectory sampling strategy with a projection optimization that guides the samples toward a feasible region. As a result, our approach can recover from the frequently encountered pathological cases wherein all the sampled trajectories lie in the high-cost region. Furthermore, we also show that our projection optimization has a highly parallelizable structure that can be easily accelerated over GPUs. We push the state-of-the-art in the following respects. Over the navigation stack of the Robot Operating System (ROS), we show an improvement of 7-13% in success rate and up to two times in total travel time metric. On the same benchmarks and metrics, our approach achieves up to 44% improvement over MPPI and its recent variants. On simple point-to-point navigation tasks, our optimizer is up to two times more reliable than SOTA gradient-based solvers, as well as sampling-based approaches such as the Cross-Entropy Method (CEM) and VPSTO. Codes: https://github.com/fatemeh-rastgar/PRIEST
GPU Accelerated Batch Multi-Convex Trajectory Optimization for a Rectangular Holonomic Mobile Robot
Sep 27, 2021


We present a batch trajectory optimizer that can simultaneously solve hundreds of different instances of the problem in real-time. We consider holonomic robots but relax the assumption of circular base footprint. Our main algorithmic contributions lie in: (i) improving the computational tractability of the underlying non-convex problem and (ii) leveraging batch computation to mitigate initialization bottlenecks and improve solution quality. We achieve both goals by deriving a multi-convex reformulation of the kinematics and collision avoidance constraints. We exploit these structures through an Alternating Minimization approach and show that the resulting batch operation reduces to computing just matrix-vector products that can be trivially accelerated over GPUs. We improve the state-of-the-art in three respects. First, we improve quality of navigation (success-rate, tracking) as compared to baseline approach that relies on computing a single locally optimal trajectory at each control loop. Second, we show that when initialized with trajectory samples from a Gaussian distribution, our batch optimizer outperforms state-of-the-art cross-entropy method in solution quality. Finally, our batch optimizer is several orders of magnitude faster than the conceptually simpler alternative of running different optimization instances in parallel CPU threads. \textbf{Codes:} \url{https://tinyurl.com/a3b99m8}
Embedded Hardware Appropriate Fast 3D Trajectory Optimization for Fixed Wing Aerial Vehicles by Leveraging Hidden Convex Structures
Sep 26, 2021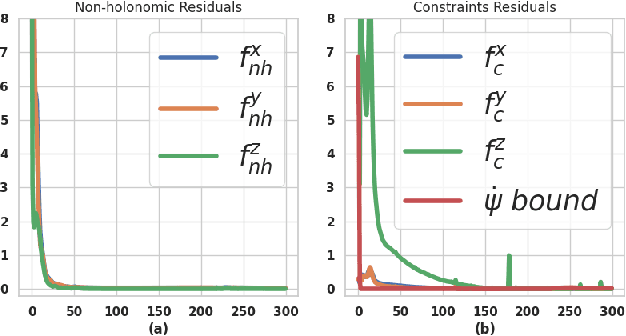
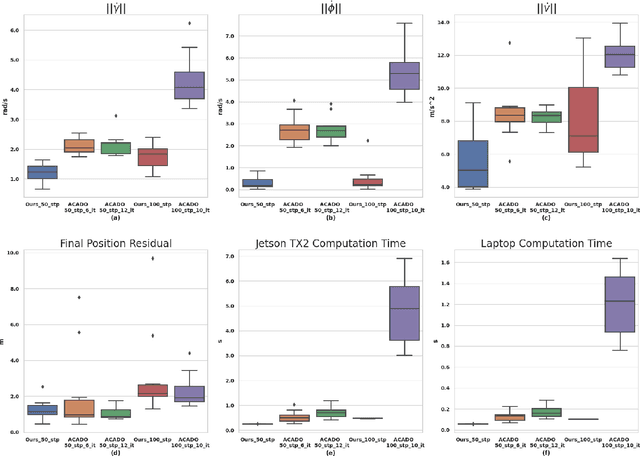
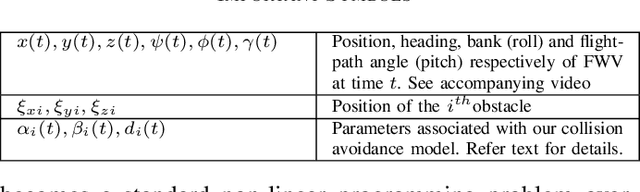
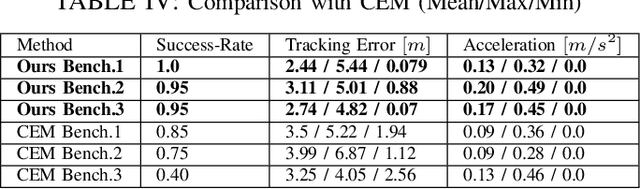
Most commercially available fixed-wing aerial vehicles (FWV) can carry only small, lightweight computing hardware such as Jetson TX2 onboard. Solving non-linear trajectory optimization on these computing resources is computationally challenging even while considering only the kinematic motion model. Most importantly, the computation time increases sharply as the environment becomes more cluttered. In this paper, we take a step towards overcoming this bottleneck and propose a trajectory optimizer that achieves online performance on both conventional laptops/desktops and Jetson TX2 in a typical urban environment setting. Our optimizer builds on the novel insight that the seemingly non-linear trajectory optimization problem for FWV has an implicit multi-convex structure. Our optimizer exploits these computational structures by bringing together diverse concepts from Alternating Minimization, Bregman iteration, and Alternating Direction Method of Multipliers. We show that our optimizer outperforms the state-of-the-art implementation of sequential quadratic programming approach in optimal control solver ACADO in computation time and solution quality measured in terms of control and goal reaching cost.
GPU Accelerated Convex Approximations for Fast Multi-Agent Trajectory Optimization
Nov 09, 2020

In this paper, we present a computationally efficient trajectory optimizer that can exploit GPUs to jointly compute trajectories of tens of agents in under a second. At the heart of our optimizer is a novel reformulation of the non-convex collision avoidance constraints that reduces the core computation in each iteration to that of solving a large scale, convex, unconstrained Quadratic Program (QP). We also show that the matrix factorization/inverse computation associated with the QP needs to be done only once and can be done offline for a given number of agents. This further simplifies the solution process, effectively reducing it to a problem of evaluating a few matrix-vector products. Moreover, for a large number of agents, this computation can be trivially accelerated on GPUs using existing off-the-shelf libraries. We validate our optimizer's performance on challenging benchmarks and show substantial improvement over state of the art in computation time and trajectory quality.