 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonoMPC: Monocular Vision Based Navigation with Learned Collision Model and Risk-Aware Model Predictive Control
Aug 10, 2025Navigating unknown environments with a single RGB camera is challenging, as the lack of depth information prevents reliable collision-checking. While some methods use estimated depth to build collision maps, we found that depth estimates from vision foundation models are too noisy for zero-shot navigation in cluttered environments. We propose an alternative approach: instead of using noisy estimated depth for direct collision-checking, we use it as a rich context input to a learned collision model. This model predicts the distribution of minimum obstacle clearance that the robot can expect for a given control sequence. At inference, these predictions inform a risk-aware MPC planner that minimizes estimated collision risk. Our joint learning pipeline co-trains the collision model and risk metric using both safe and unsafe trajectories. Crucially, our joint-training ensures optimal variance in our collision model that improves navigation in highly cluttered environments. Consequently, real-world experiments show 9x and 7x improvements in success rates over NoMaD and the ROS stack, respectively. Ablation studies further validate the effectiveness of our design choices.
Trajectory Optimization Under Stochastic Dynamics Leveraging Maximum Mean Discrepancy
Jan 31, 2025



This paper addresses sampling-based trajectory optimization for risk-aware navigation under stochastic dynamics. Typically such approaches operate by computing $\tilde{N}$ perturbed rollouts around the nominal dynamics to estimate the collision risk associated with a sequence of control commands. We consider a setting where it is expensive to estimate risk using perturbed rollouts, for example, due to expensive collision-checks. We put forward two key contributions. First, we develop an algorithm that distills the statistical information from a larger set of rollouts to a reduced-set with sample size $N<<\tilde{N}$. Consequently, we estimate collision risk using just $N$ rollouts instead of $\tilde{N}$. Second, we formulate a novel surrogate for the collision risk that can leverage the distilled statistical information contained in the reduced-set. We formalize both algorithmic contributions using distribution embedding in Reproducing Kernel Hilbert Space (RKHS) and Maximum Mean Discrepancy (MMD). We perform extensive benchmarking to demonstrate that our MMD-based approach leads to safer trajectories at low sample regime than existing baselines using Conditional Value-at Risk (CVaR) based collision risk estimate.
MMD-OPT : Maximum Mean Discrepancy Based Sample Efficient Collision Risk Minimization for Autonomous Driving
Dec 12, 2024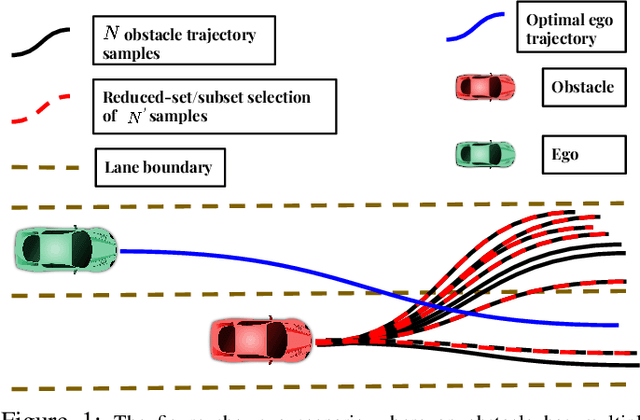
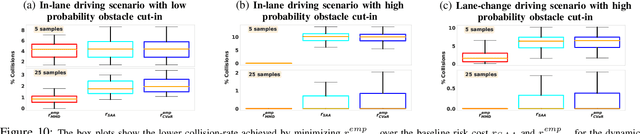
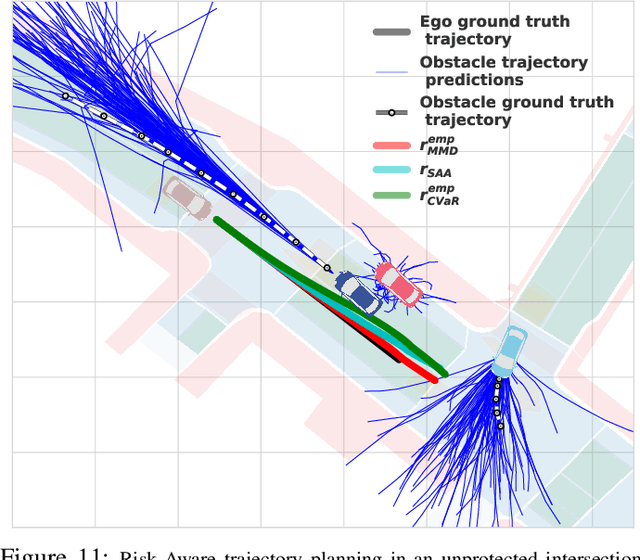
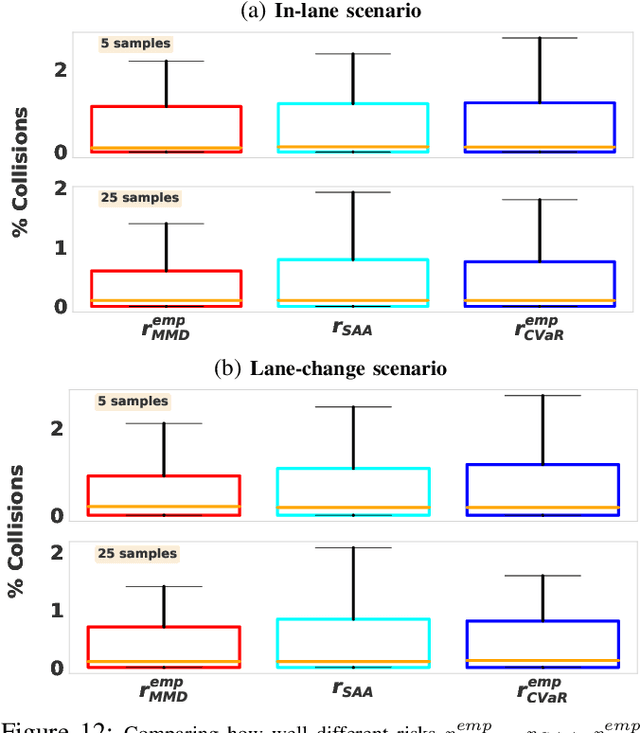
We propose MMD-OPT: a sample-efficient approach for minimizing the risk of collision under arbitrary prediction distribution of the dynamic obstacles. MMD-OPT is based on embedding distribution in Reproducing Kernel Hilbert Space (RKHS) and the associated Maximum Mean Discrepancy (MMD). We show how these two concepts can be used to define a sample efficient surrogate for collision risk estimate. We perform extensive simulations to validate the effectiveness of MMD-OPT on both synthetic and real-world datasets. Importantly, we show that trajectory optimization with our MMD-based collision risk surrogate leads to safer trajectories at low sample regimes than popular alternatives based on Conditional Value at Risk (CVaR).
Learning Sampling Distribution and Safety Filter for Autonomous Driving with VQ-VAE and Differentiable Optimization
Mar 28, 2024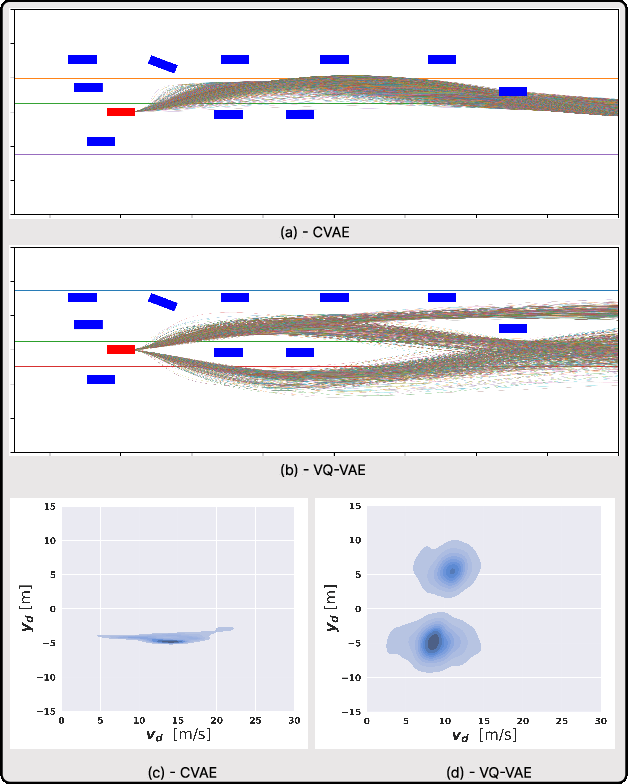

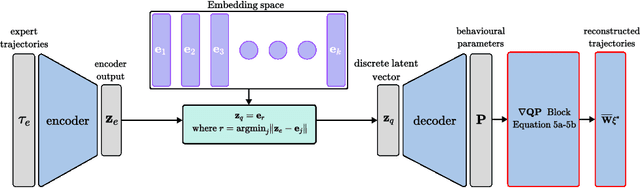
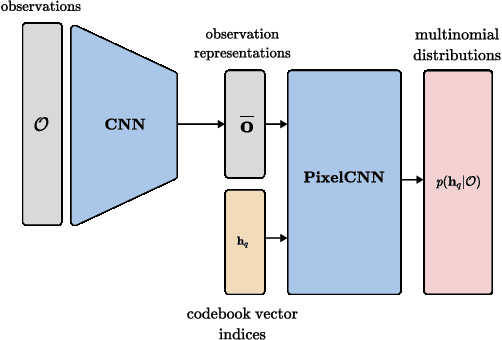
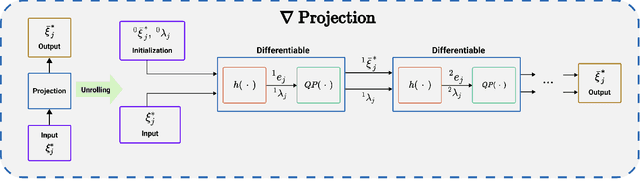
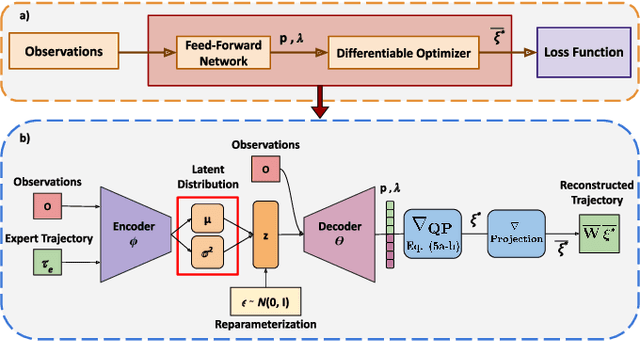
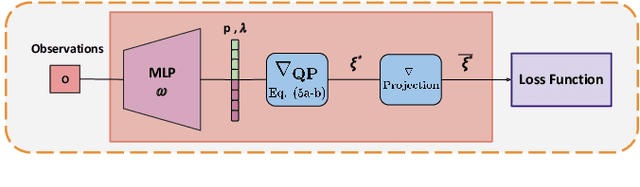
Sampling trajectories from a distribution followed by ranking them based on a specified cost function is a common approach in autonomous driving. Typically, the sampling distribution is hand-crafted (e.g a Gaussian, or a grid). Recently, there have been efforts towards learning the sampling distribution through generative models such as Conditional Variational Autoencoder (CVAE). However, these approaches fail to capture the multi-modality of the driving behaviour due to the Gaussian latent prior of the CVAE. Thus, in this paper, we re-imagine the distribution learning through vector quantized variational autoencoder (VQ-VAE), whose discrete latent-space is well equipped to capture multi-modal sampling distribution. The VQ-VAE is trained with demonstration data of optimal trajectories. We further propose a differentiable optimization based safety filter to minimally correct the VQVAE sampled trajectories to ensure collision avoidance. We use backpropagation through the optimization layers in a self-supervised learning set-up to learn good initialization and optimal parameters of the safety filter. We perform extensive comparisons with state-of-the-art CVAE-based baseline in dense and aggressive traffic scenarios and show a reduction of up to 12 times in collision-rate while being competitive in driving speeds.
End-to-End Learning of Behavioural Inputs for Autonomous Driving in Dense Traffic
Oct 23, 2023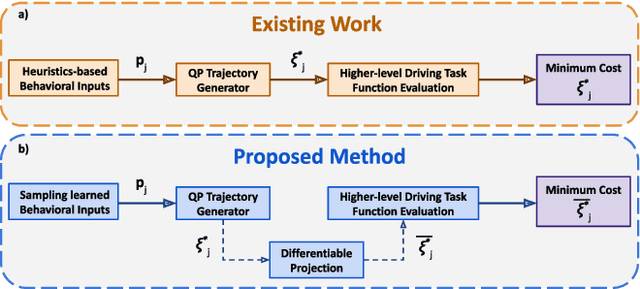
Trajectory sampling in the Frenet(road-aligned) frame, is one of the most popular methods for motion planning of autonomous vehicles. It operates by sampling a set of behavioural inputs, such as lane offset and forward speed, before solving a trajectory optimization problem conditioned on the sampled inputs. The sampling is handcrafted based on simple heuristics, does not adapt to driving scenarios, and is oblivious to the capabilities of downstream trajectory planners. In this paper, we propose an end-to-end learning of behavioural input distribution from expert demonstrations or in a self-supervised manner. Our core novelty lies in embedding a custom differentiable trajectory optimizer as a layer in neural networks, allowing us to update behavioural inputs by considering the optimizer's feedback. Moreover, our end-to-end approach also ensures that the learned behavioural inputs aid the convergence of the optimizer. We improve the state-of-the-art in the following aspects. First, we show that learned behavioural inputs substantially decrease collision rate while improving driving efficiency over handcrafted approaches. Second, our approach outperforms model predictive control methods based on sampling-based optimization.
Hilbert Space Embedding-based Trajectory Optimization for Multi-Modal Uncertain Obstacle Trajectory Prediction
Oct 12, 2023



Safe autonomous driving critically depends on how well the ego-vehicle can predict the trajectories of neighboring vehicles. To this end, several trajectory prediction algorithms have been presented in the existing literature. Many of these approaches output a multi-modal distribution of obstacle trajectories instead of a single deterministic prediction to account for the underlying uncertainty. However, existing planners cannot handle the multi-modality based on just sample-level information of the predictions. With this motivation, this paper proposes a trajectory optimizer that can leverage the distributional aspects of the prediction in a computationally tractable and sample-efficient manner. Our optimizer can work with arbitrarily complex distributions and thus can be used with output distribution represented as a deep neural network. The core of our approach is built on embedding distribution in Reproducing Kernel Hilbert Space (RKHS), which we leverage in two ways. First, we propose an RKHS embedding approach to select probable samples from the obstacle trajectory distribution. Second, we rephrase chance-constrained optimization as distribution matching in RKHS and propose a novel sampling-based optimizer for its solution. We validate our approach with hand-crafted and neural network-based predictors trained on real-world datasets and show improvement over the existing stochastic optimization approaches in safety metrics.
PRIEST: Projection Guided Sampling-Based Optimization For Autonomous Navigation
Sep 15, 2023



Efficient navigation in unknown and dynamic environments is crucial for expanding the application domain of mobile robots. The core challenge stems from the nonavailability of a feasible global path for guiding optimization-based local planners. As a result, existing local planners often get trapped in poor local minima. In this paper, we present a novel optimizer that can explore multiple homotopies to plan high-quality trajectories over long horizons while still being fast enough for real-time applications. We build on the gradient-free paradigm by augmenting the trajectory sampling strategy with a projection optimization that guides the samples toward a feasible region. As a result, our approach can recover from the frequently encountered pathological cases wherein all the sampled trajectories lie in the high-cost region. Furthermore, we also show that our projection optimization has a highly parallelizable structure that can be easily accelerated over GPUs. We push the state-of-the-art in the following respects. Over the navigation stack of the Robot Operating System (ROS), we show an improvement of 7-13% in success rate and up to two times in total travel time metric. On the same benchmarks and metrics, our approach achieves up to 44% improvement over MPPI and its recent variants. On simple point-to-point navigation tasks, our optimizer is up to two times more reliable than SOTA gradient-based solvers, as well as sampling-based approaches such as the Cross-Entropy Method (CEM) and VPSTO. Codes: https://github.com/fatemeh-rastgar/PRIEST
UAP-BEV: Uncertainty Aware Planning using Bird's Eye View generated from Surround Monocular Images
Jun 08, 2023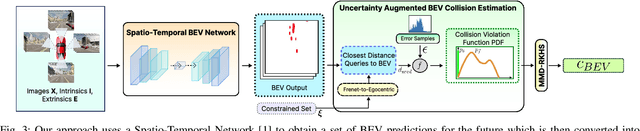
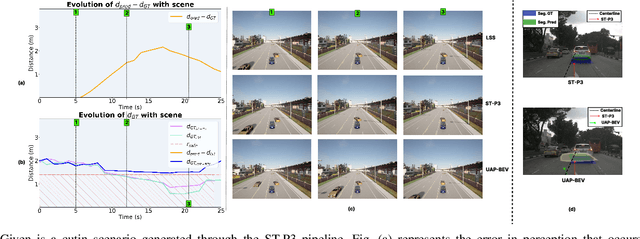
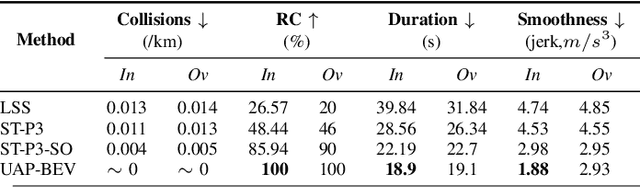
Autonomous driving requires accurate reasoning of the location of objects from raw sensor data. Recent end-to-end learning methods go from raw sensor data to a trajectory output via Bird's Eye View(BEV) segmentation as an interpretable intermediate representation. Motion planning over cost maps generated via Birds Eye View (BEV) segmentation has emerged as a prominent approach in autonomous driving. However, the current approaches have two critical gaps. First, the optimization process is simplistic and involves just evaluating a fixed set of trajectories over the cost map. The trajectory samples are not adapted based on their associated cost values. Second, the existing cost maps do not account for the uncertainty in the cost maps that can arise due to noise in RGB images, and BEV annotations. As a result, these approaches can struggle in challenging scenarios where there is abrupt cut-in, stopping, overtaking, merging, etc from the neighboring vehicles. In this paper, we propose UAP-BEV: A novel approach that models the noise in Spatio-Temporal BEV predictions to create an uncertainty-aware occupancy grid map. Using queries of the distance to the closest occupied cell, we obtain a sample estimate of the collision probability of the ego-vehicle. Subsequently, our approach uses gradient-free sampling-based optimization to compute low-cost trajectories over the cost map. Importantly, the sampling distribution is adapted based on the optimal cost values of the sampled trajectories. By explicitly modeling probabilistic collision avoidance in the BEV space, our approach is able to outperform the cost-map-based baselines in collision avoidance, route completion, time to completion, and smoothness. To further validate our method, we also show results on the real-world dataset NuScenes, where we report improvements in collision avoidance and smoothness.