Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMMD-OPT : Maximum Mean Discrepancy Based Sample Efficient Collision Risk Minimization for Autonomous Driving
Paper and Code
Dec 12, 2024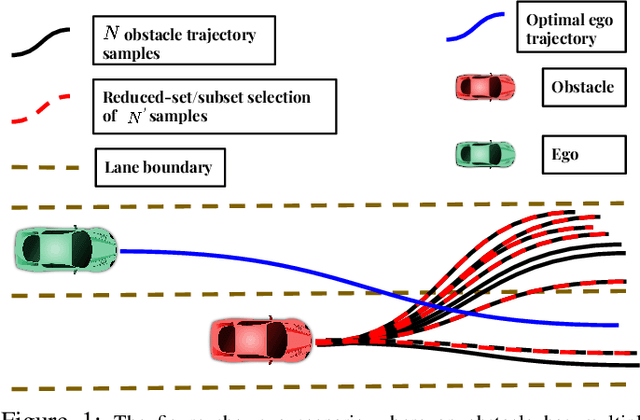
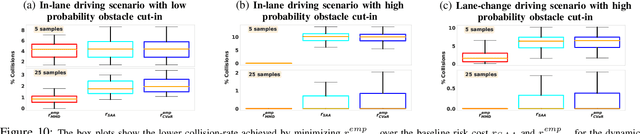
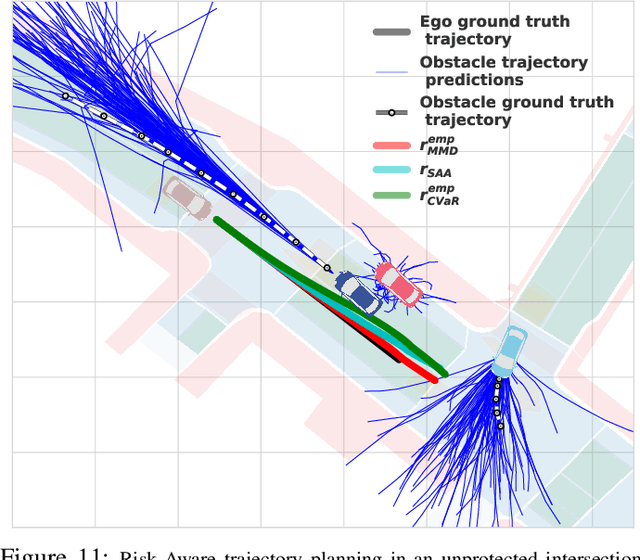
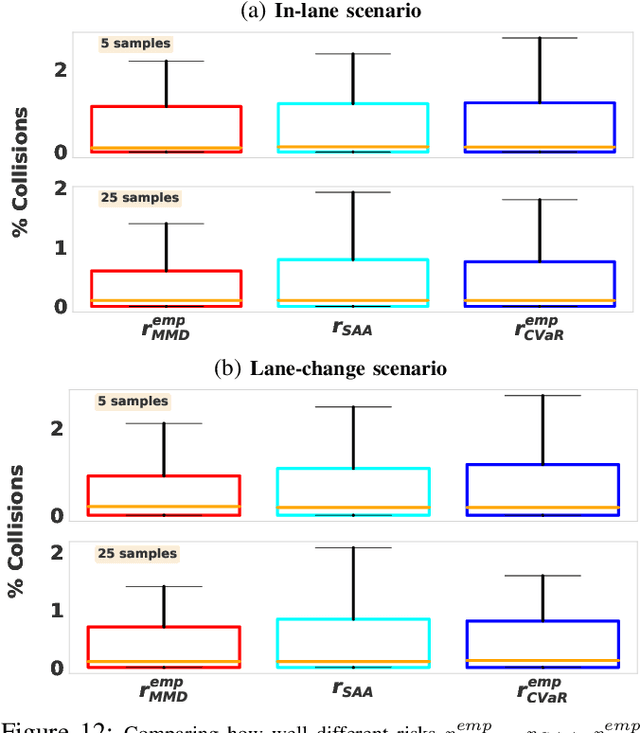
We propose MMD-OPT: a sample-efficient approach for minimizing the risk of collision under arbitrary prediction distribution of the dynamic obstacles. MMD-OPT is based on embedding distribution in Reproducing Kernel Hilbert Space (RKHS) and the associated Maximum Mean Discrepancy (MMD). We show how these two concepts can be used to define a sample efficient surrogate for collision risk estimate. We perform extensive simulations to validate the effectiveness of MMD-OPT on both synthetic and real-world datasets. Importantly, we show that trajectory optimization with our MMD-based collision risk surrogate leads to safer trajectories at low sample regimes than popular alternatives based on Conditional Value at Risk (CVaR).
View paper on