 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReceptogenesis in a Vascularized Robotic Embodiment
Mar 10, 2026Equipping robotic systems with the capacity to generate $\textit{ex novo}$ hardware during operation extends control of physical adaptability. Unlike modular systems that rely on discrete component integration pre- or post-deployment, we envision the possibility that physical adaptation and development emerge from dynamic material restructuring to shape the body's intrinsic functions. Drawing inspiration from circulatory systems that redistribute mass and function in biological organisms, we utilize fluidics to restructure the material interface, a capability currently unpaired in robotics. Here, we realize this synthetic growth capability through a vascularized robotic composite designed for programmable material synthesis, demonstrated via receptogenesis - the on-demand construction of sensors from internal fluid reserves based on environmental cues. By coordinating the fluidic transport of precursors with external localized UV irradiation, we drive an $\textit{in situ}$ photopolymerization that chemically reconstructs the vasculature from the inside out. This reaction converts precursors with photolatent initiator into a solid dispersion of UV-sensitive polypyrrole, establishing a sensing modality validated by a characteristic decrease in electrical impedance. The newly synthesized sensor closed a control loop to regulate wing flapping in a moth-inspired robotic demonstrator. This physical update increased the robot's capability in real time. This work establishes a materials-based framework for constitutive evolution, enabling robots to physically grow the hardware needed to support emerging behaviors in a complex environment; for example, suggesting a pathway toward autonomous systems capable of generating specialized features, such as neurovascular systems in situated robotics.
PRIEST: Projection Guided Sampling-Based Optimization For Autonomous Navigation
Sep 15, 2023



Efficient navigation in unknown and dynamic environments is crucial for expanding the application domain of mobile robots. The core challenge stems from the nonavailability of a feasible global path for guiding optimization-based local planners. As a result, existing local planners often get trapped in poor local minima. In this paper, we present a novel optimizer that can explore multiple homotopies to plan high-quality trajectories over long horizons while still being fast enough for real-time applications. We build on the gradient-free paradigm by augmenting the trajectory sampling strategy with a projection optimization that guides the samples toward a feasible region. As a result, our approach can recover from the frequently encountered pathological cases wherein all the sampled trajectories lie in the high-cost region. Furthermore, we also show that our projection optimization has a highly parallelizable structure that can be easily accelerated over GPUs. We push the state-of-the-art in the following respects. Over the navigation stack of the Robot Operating System (ROS), we show an improvement of 7-13% in success rate and up to two times in total travel time metric. On the same benchmarks and metrics, our approach achieves up to 44% improvement over MPPI and its recent variants. On simple point-to-point navigation tasks, our optimizer is up to two times more reliable than SOTA gradient-based solvers, as well as sampling-based approaches such as the Cross-Entropy Method (CEM) and VPSTO. Codes: https://github.com/fatemeh-rastgar/PRIEST
GPU Accelerated Batch Multi-Convex Trajectory Optimization for a Rectangular Holonomic Mobile Robot
Sep 27, 2021


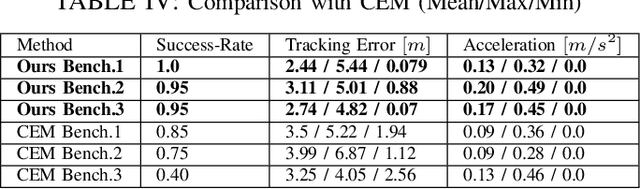
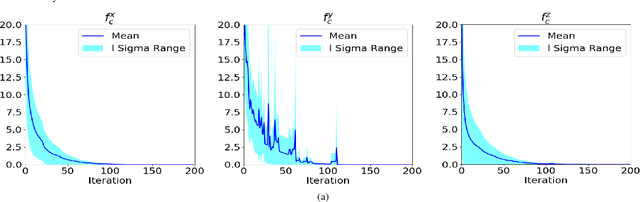
We present a batch trajectory optimizer that can simultaneously solve hundreds of different instances of the problem in real-time. We consider holonomic robots but relax the assumption of circular base footprint. Our main algorithmic contributions lie in: (i) improving the computational tractability of the underlying non-convex problem and (ii) leveraging batch computation to mitigate initialization bottlenecks and improve solution quality. We achieve both goals by deriving a multi-convex reformulation of the kinematics and collision avoidance constraints. We exploit these structures through an Alternating Minimization approach and show that the resulting batch operation reduces to computing just matrix-vector products that can be trivially accelerated over GPUs. We improve the state-of-the-art in three respects. First, we improve quality of navigation (success-rate, tracking) as compared to baseline approach that relies on computing a single locally optimal trajectory at each control loop. Second, we show that when initialized with trajectory samples from a Gaussian distribution, our batch optimizer outperforms state-of-the-art cross-entropy method in solution quality. Finally, our batch optimizer is several orders of magnitude faster than the conceptually simpler alternative of running different optimization instances in parallel CPU threads. \textbf{Codes:} \url{https://tinyurl.com/a3b99m8}
GPU Accelerated Convex Approximations for Fast Multi-Agent Trajectory Optimization
Nov 09, 2020

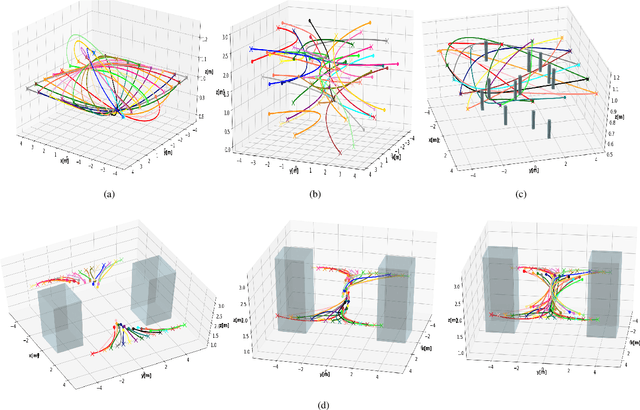
In this paper, we present a computationally efficient trajectory optimizer that can exploit GPUs to jointly compute trajectories of tens of agents in under a second. At the heart of our optimizer is a novel reformulation of the non-convex collision avoidance constraints that reduces the core computation in each iteration to that of solving a large scale, convex, unconstrained Quadratic Program (QP). We also show that the matrix factorization/inverse computation associated with the QP needs to be done only once and can be done offline for a given number of agents. This further simplifies the solution process, effectively reducing it to a problem of evaluating a few matrix-vector products. Moreover, for a large number of agents, this computation can be trivially accelerated on GPUs using existing off-the-shelf libraries. We validate our optimizer's performance on challenging benchmarks and show substantial improvement over state of the art in computation time and trajectory quality.