 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCo-Creating Buildable and Open Social Robot Study Companions with University Students
Jun 13, 2026Open-source social robots offer accessibility, repairability, and student empowerment, yet the build itself often presents a barrier. Existing platforms either ship pre-assembled, foreclosing hands-on learning, or expose students to unfamiliar fasteners, opaque wiring, and inaccessible service points that erode engagement. Whether targeted mechanical redesign can lower this barrier whilst maintaining structural integrity remains untested. Here we show that Design for Assembly (DfA) and Design for Disassembly (DfD) interventions reshape how a build feels before they shorten how long it takes. Working with university students in Guyana and Estonia, we applied the Double Diamond framework to co-create the Robot Study Companion (RSC) v4.1: mapping pain points, then redesigning its chassis around twist-lock fasteners, snap-fit joints, and tool-free service latches. Across two studies with developers and first-time builders, system usability climbed from Poor to Excellent (SUS 59.4 to 89.4), perceived workload trended downward (NASA-TLX 4.29 to 4.00), and mean assembly time trended downward (21.4 to 13.7 minutes, with juniors' learning effect), whilst orientation cues and navigation continuity for first-time builders emerged as the next documentation frontier. Perceived workload, not completion time, appears to govern whether students take up open hardware.
Benchmarking Local Language Models for Social Robots using Edge Devices
May 04, 2026Social-educational robots designed for socially interactive pedagogical support, such as the Robot Study Companion (RSC), rely on responsive, privacy-preserving interaction despite severely limited compute. However, there is a gap in systematic benchmarking of language models for edge computing in pedagogical applications. This paper benchmarks 25 open-source language models for local deployment on edge hardware. We evaluate each model across three dimensions: inference efficiency (tokens per second, energy consumption), general knowledge (a six-category MMLU subset), and teaching effectiveness (LLM-rated pedagogical quality), validated against five independent human raters using the Raspberry Pi(RPi)4 as the primary platform, with additional comparisons on the RPi5 and a laptop GPU. Results reveal pronounced trade-offs: throughput and energy efficiency vary by over an order of magnitude across models, MMLU accuracy ranges from near-random to 57.2%, and teaching effectiveness does not correlate monotonically with either metric. Among the evaluated models, Granite4 Tiny Hybrid (7B) achieves a strong overall balance, reaching 2.5 tokens per second, 0.90 tokens per joule, and 54.6% MMLU accuracy; high MMLU accuracy does not appear necessary for strong teaching scores. Human validation on four representative models preserved the automated rank ordering (Pearson r = 0.967, n = 4). Based on these findings, we propose a three-tier local inference architecture for the RSC that balances responsiveness and accuracy on resource-constrained hardware.
Multimodal Grounding for Embodied AI via Augmented Reality Headsets for Natural Language Driven Task Planning
Apr 26, 2023Recent advances in generative modeling have spurred a resurgence in the field of Embodied Artificial Intelligence (EAI). EAI systems typically deploy large language models to physical systems capable of interacting with their environment. In our exploration of EAI for industrial domains, we successfully demonstrate the feasibility of co-located, human-robot teaming. Specifically, we construct an experiment where an Augmented Reality (AR) headset mediates information exchange between an EAI agent and human operator for a variety of inspection tasks. To our knowledge the use of an AR headset for multimodal grounding and the application of EAI to industrial tasks are novel contributions within Embodied AI research. In addition, we highlight potential pitfalls in EAI's construction by providing quantitative and qualitative analysis on prompt robustness.
GPU Accelerated Batch Multi-Convex Trajectory Optimization for a Rectangular Holonomic Mobile Robot
Sep 27, 2021


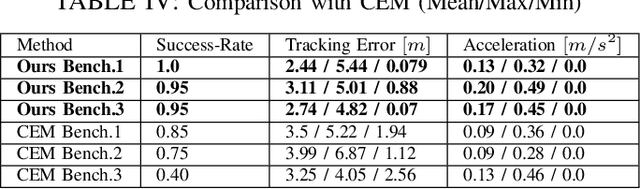
We present a batch trajectory optimizer that can simultaneously solve hundreds of different instances of the problem in real-time. We consider holonomic robots but relax the assumption of circular base footprint. Our main algorithmic contributions lie in: (i) improving the computational tractability of the underlying non-convex problem and (ii) leveraging batch computation to mitigate initialization bottlenecks and improve solution quality. We achieve both goals by deriving a multi-convex reformulation of the kinematics and collision avoidance constraints. We exploit these structures through an Alternating Minimization approach and show that the resulting batch operation reduces to computing just matrix-vector products that can be trivially accelerated over GPUs. We improve the state-of-the-art in three respects. First, we improve quality of navigation (success-rate, tracking) as compared to baseline approach that relies on computing a single locally optimal trajectory at each control loop. Second, we show that when initialized with trajectory samples from a Gaussian distribution, our batch optimizer outperforms state-of-the-art cross-entropy method in solution quality. Finally, our batch optimizer is several orders of magnitude faster than the conceptually simpler alternative of running different optimization instances in parallel CPU threads. \textbf{Codes:} \url{https://tinyurl.com/a3b99m8}
Fast Adaptation of Manipulator Trajectories to Task Perturbation By Differentiating through the Optimal Solution
Nov 01, 2020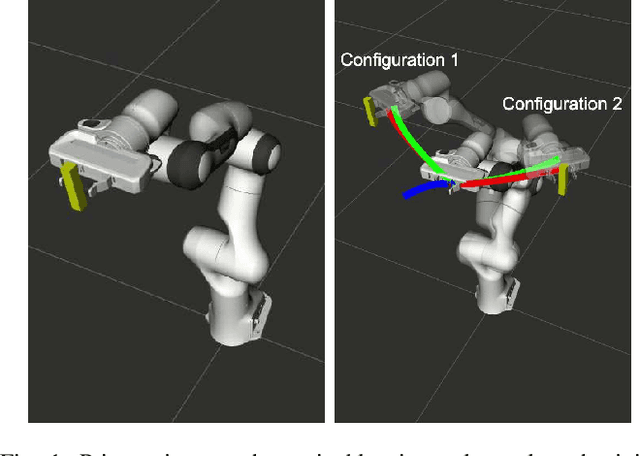
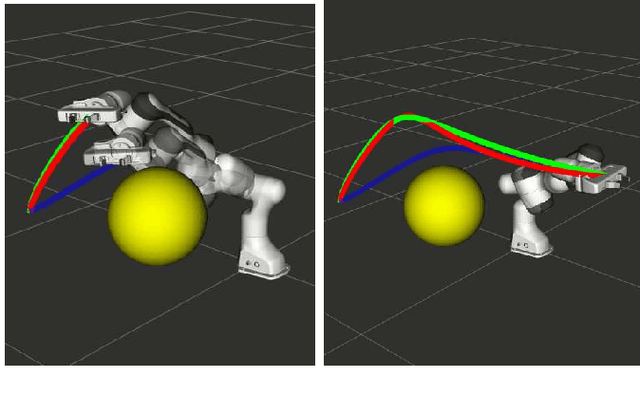
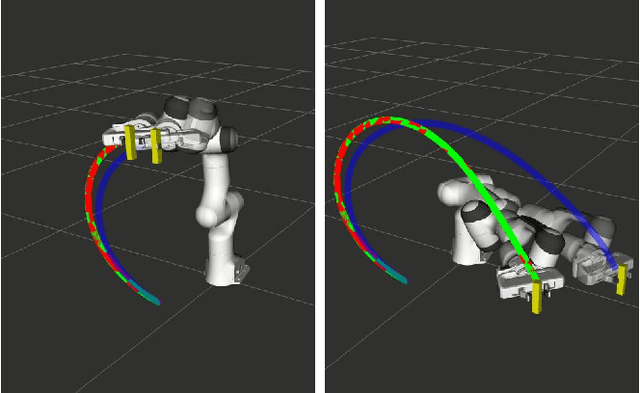
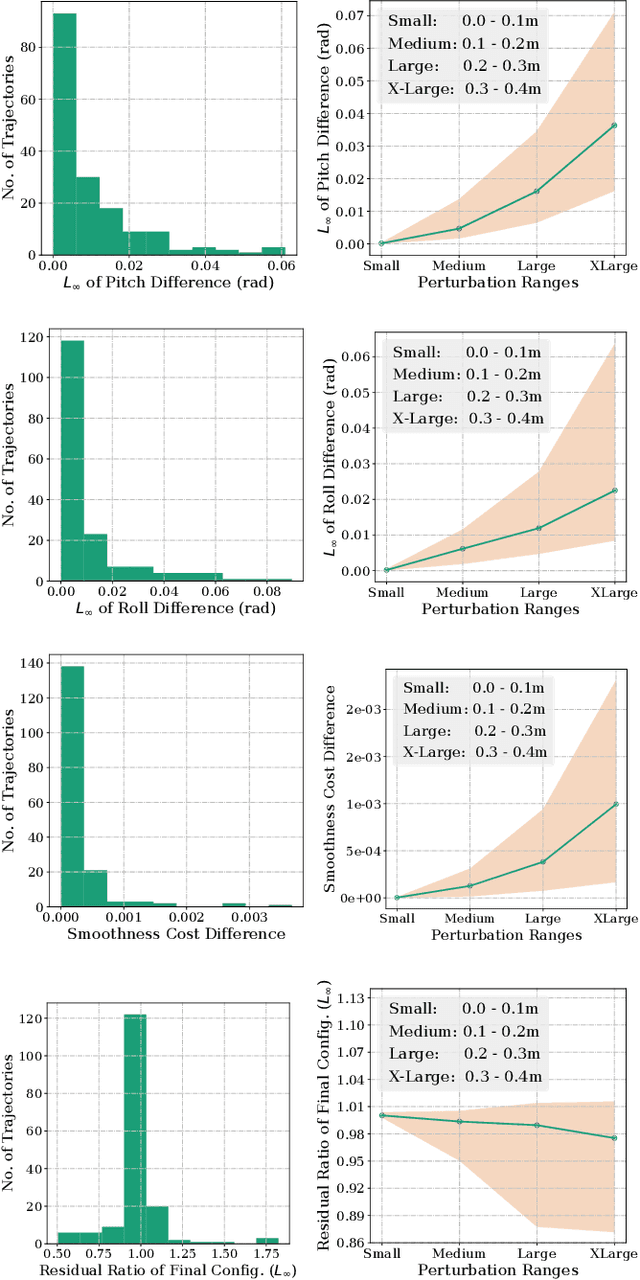
Joint space trajectory optimization under end-effector task constraints leads to a challenging non-convex problem. Thus, a real-time adaptation of prior computed trajectories to perturbation in task constraints often becomes intractable. Existing works use the so-called warm-starting of trajectory optimization to improve computational performance. We present a fundamentally different approach that relies on deriving analytical gradients of the optimal solution with respect to the task constraint parameters. This gradient map characterizes the direction in which the prior computed joint trajectories need to be deformed to comply with the new task constraints. Subsequently, we develop an iterative line-search algorithm for computing the scale of deformation. Our algorithm provides near real-time adaptation of joint trajectories for a diverse class of task perturbations such as (i) changes in initial and final joint configurations of end-effector orientation-constrained trajectories and (ii) changes in end-effector goal or way-points under end-effector orientation constraints. We relate each of these examples to real-world applications ranging from learning from demonstration to obstacle avoidance. We also show that our algorithm produces trajectories with quality similar to what one would obtain by solving the trajectory optimization from scratch with warm-start initialization. But most importantly, our algorithm achieves a worst-case speed-up of 160x over the latter approach.