 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceptive Hierarchical-Task MPC for Sequential Mobile Manipulation in Unstructured Semi-Static Environments
Mar 10, 2026As compared to typical mobile manipulation tasks, sequential mobile manipulation poses a unique challenge -- as the robot operates over extended periods, successful task completion is not solely dependent on consistent motion generation but also on the robot's awareness and adaptivity to changes in the operating environment. While existing motion planners can generate whole-body trajectories to complete sequential tasks, they typically assume that the environment remains static and rely on precomputed maps. This assumption often breaks down during long-term operations, where semi-static changes such as object removal, introduction, or shifts are common. In this work, we propose a novel perceptive hierarchical-task model predictive control (HTMPC) framework for efficient sequential mobile manipulation in unstructured, changing environments. To tackle the challenge, we leverage a Bayesian inference framework to explicitly model object-level changes and thereby maintain a temporally accurate representation of the 3D environment; this up-to-date representation is embedded in a lexicographic optimization framework to enable efficient execution of sequential tasks. We validate our perceptive HTMPC approach through both simulated and real-robot experiments. In contrast to baseline methods, our approach systematically accounts for moved and phantom obstacles, successfully completing sequential tasks with higher efficiency and reactivity, without relying on prior maps or external infrastructure.
Closing the Perception-Action Loop for Semantically Safe Navigation in Semi-Static Environments
Apr 22, 2024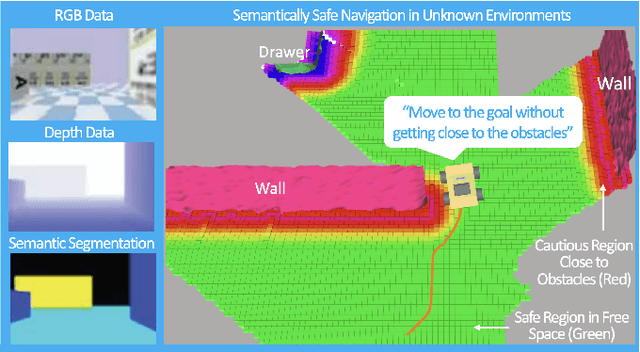
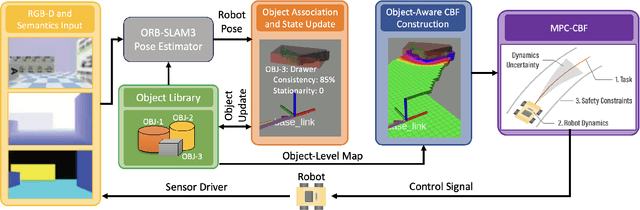
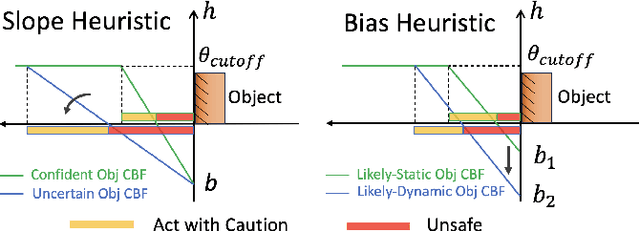
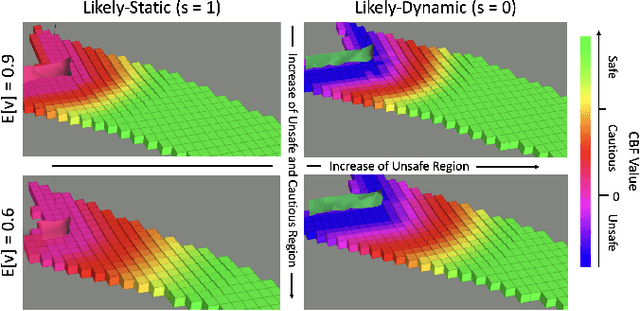
Autonomous robots navigating in changing environments demand adaptive navigation strategies for safe long-term operation. While many modern control paradigms offer theoretical guarantees, they often assume known extrinsic safety constraints, overlooking challenges when deployed in real-world environments where objects can appear, disappear, and shift over time. In this paper, we present a closed-loop perception-action pipeline that bridges this gap. Our system encodes an online-constructed dense map, along with object-level semantic and consistency estimates into a control barrier function (CBF) to regulate safe regions in the scene. A model predictive controller (MPC) leverages the CBF-based safety constraints to adapt its navigation behaviour, which is particularly crucial when potential scene changes occur. We test the system in simulations and real-world experiments to demonstrate the impact of semantic information and scene change handling on robot behavior, validating the practicality of our approach.
Uncertainty-aware 3D Object-Level Mapping with Deep Shape Priors
Sep 17, 2023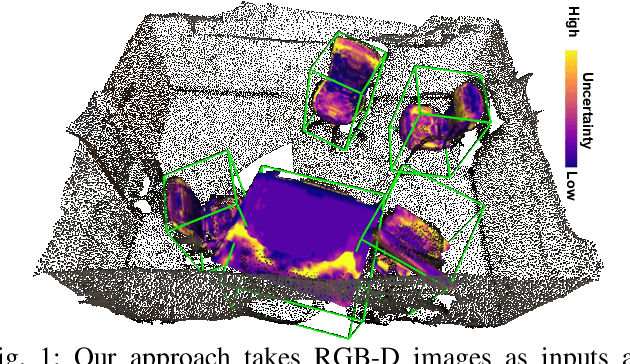
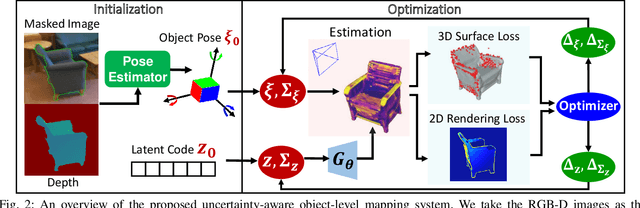
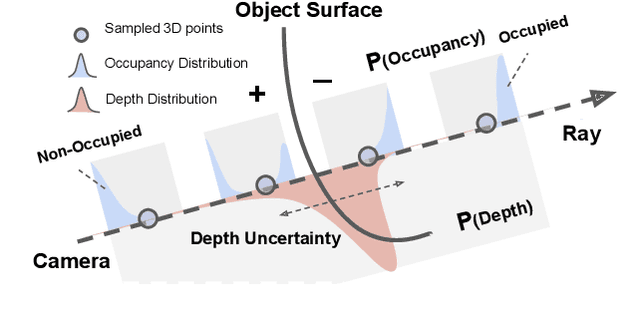
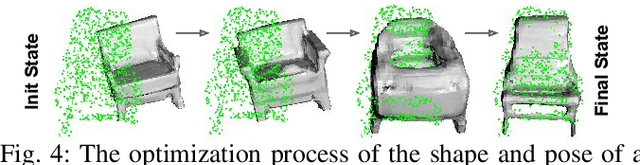
3D object-level mapping is a fundamental problem in robotics, which is especially challenging when object CAD models are unavailable during inference. In this work, we propose a framework that can reconstruct high-quality object-level maps for unknown objects. Our approach takes multiple RGB-D images as input and outputs dense 3D shapes and 9-DoF poses (including 3 scale parameters) for detected objects. The core idea of our approach is to leverage a learnt generative model for shape categories as a prior and to formulate a probabilistic, uncertainty-aware optimization framework for 3D reconstruction. We derive a probabilistic formulation that propagates shape and pose uncertainty through two novel loss functions. Unlike current state-of-the-art approaches, we explicitly model the uncertainty of the object shapes and poses during our optimization, resulting in a high-quality object-level mapping system. Moreover, the resulting shape and pose uncertainties, which we demonstrate can accurately reflect the true errors of our object maps, can also be useful for downstream robotics tasks such as active vision. We perform extensive evaluations on indoor and outdoor real-world datasets, achieving achieves substantial improvements over state-of-the-art methods. Our code will be available at https://github.com/TRAILab/UncertainShapePose.
POV-SLAM: Probabilistic Object-Aware Variational SLAM in Semi-Static Environments
Jul 02, 2023



Simultaneous localization and mapping (SLAM) in slowly varying scenes is important for long-term robot task completion. Failing to detect scene changes may lead to inaccurate maps and, ultimately, lost robots. Classical SLAM algorithms assume static scenes, and recent works take dynamics into account, but require scene changes to be observed in consecutive frames. Semi-static scenes, wherein objects appear, disappear, or move slowly over time, are often overlooked, yet are critical for long-term operation. We propose an object-aware, factor-graph SLAM framework that tracks and reconstructs semi-static object-level changes. Our novel variational expectation-maximization strategy is used to optimize factor graphs involving a Gaussian-Uniform bimodal measurement likelihood for potentially-changing objects. We evaluate our approach alongside the state-of-the-art SLAM solutions in simulation and on our novel real-world SLAM dataset captured in a warehouse over four months. Our method improves the robustness of localization in the presence of semi-static changes, providing object-level reasoning about the scene.
POCD: Probabilistic Object-Level Change Detection and Volumetric Mapping in Semi-Static Scenes
May 02, 2022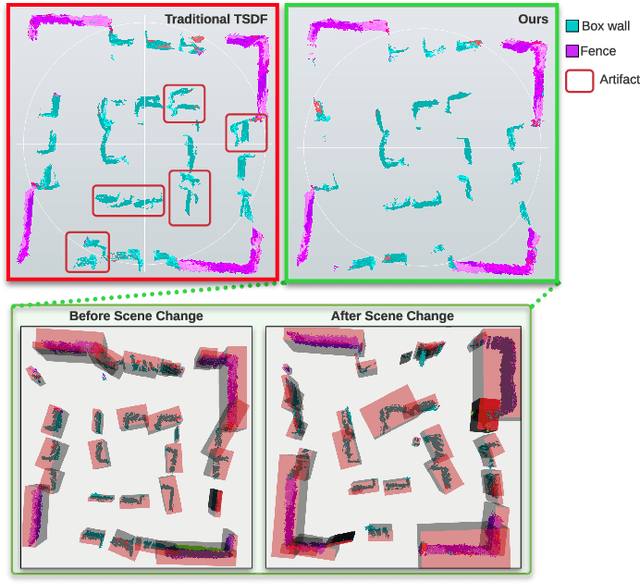
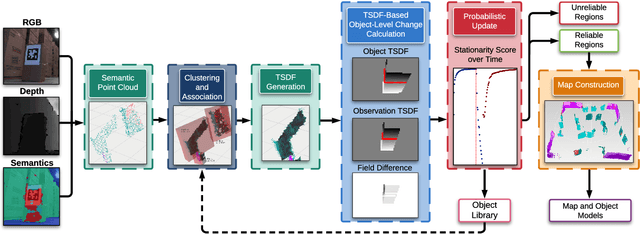

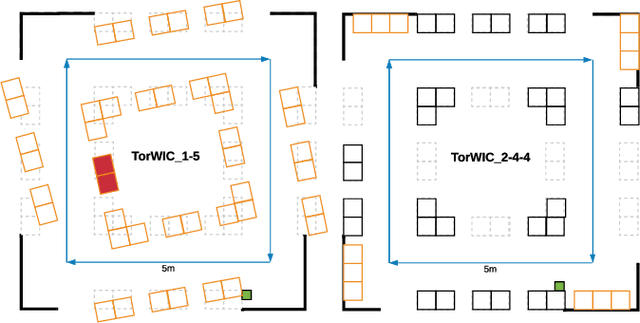
Maintaining an up-to-date map to reflect recent changes in the scene is very important, particularly in situations involving repeated traversals by a robot operating in an environment over an extended period. Undetected changes may cause a deterioration in map quality, leading to poor localization, inefficient operations, and lost robots. Volumetric methods, such as truncated signed distance functions (TSDFs), have quickly gained traction due to their real-time production of a dense and detailed map, though map updating in scenes that change over time remains a challenge. We propose a framework that introduces a novel probabilistic object state representation to track object pose changes in semi-static scenes. The representation jointly models a stationarity score and a TSDF change measure for each object. A Bayesian update rule that incorporates both geometric and semantic information is derived to achieve consistent online map maintenance. To extensively evaluate our approach alongside the state-of-the-art, we release a novel real-world dataset in a warehouse environment. We also evaluate on the public ToyCar dataset. Our method outperforms state-of-the-art methods on the reconstruction quality of semi-static environments.
Boreas: A Multi-Season Autonomous Driving Dataset
Mar 18, 2022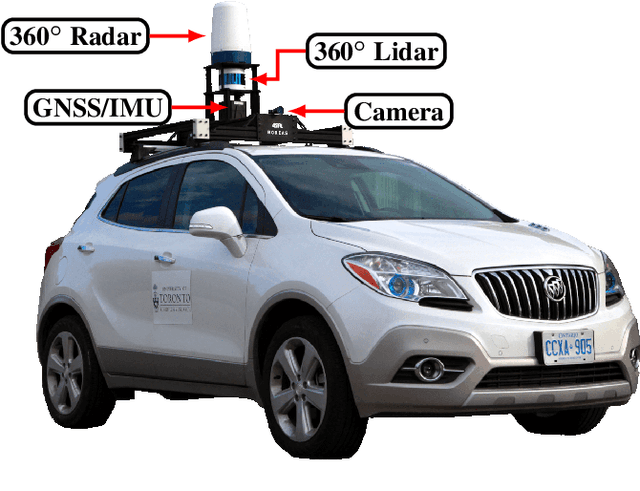
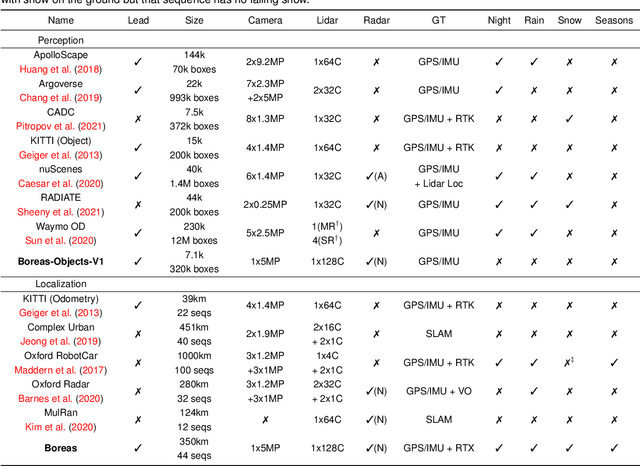


The Boreas dataset was collected by driving a repeated route over the course of one year, resulting in stark seasonal variations and adverse weather conditions such as rain and falling snow. In total, the Boreas dataset contains over 350km of driving data featuring a 128-channel Velodyne Alpha-Prime lidar, a 360 degree Navtech CIR304-H scanning radar, a 5MP FLIR Blackfly S camera, and centimetre-accurate post-processed ground truth poses. At launch, our dataset will support live leaderboards for odometry, metric localization, and 3D object detection. The dataset and development kit are available at: https://www.boreas.utias.utoronto.ca
Zeus: A System Description of the Two-Time Winner of the Collegiate SAE AutoDrive Competition
Apr 19, 2020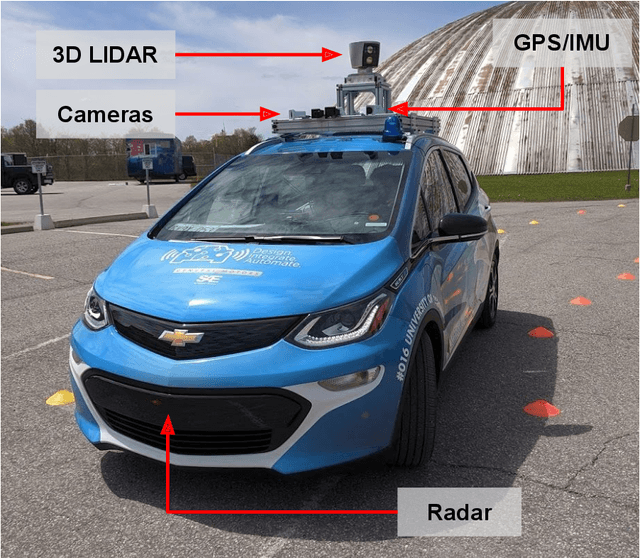
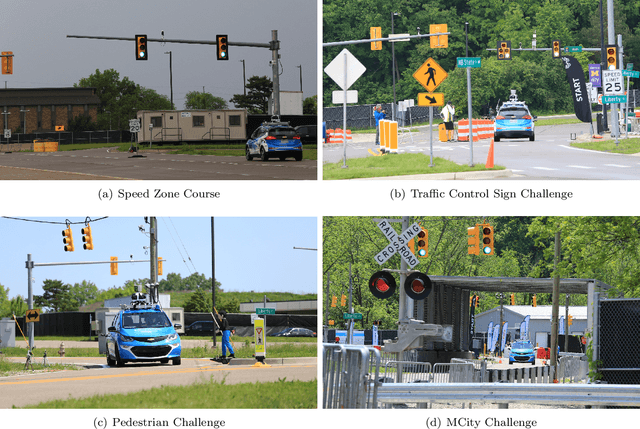
The SAE AutoDrive Challenge is a three-year collegiate competition to develop a self-driving car by 2020. The second year of the competition was held in June 2019 at MCity, a mock town built for self-driving car testing at the University of Michigan. Teams were required to autonomously navigate a series of intersections while handling pedestrians, traffic lights, and traffic signs. Zeus is aUToronto's winning entry in the AutoDrive Challenge. This article describes the system design and development of Zeus as well as many of the lessons learned along the way. This includes details on the team's organizational structure, sensor suite, software components, and performance at the Year 2 competition. With a team of mostly undergraduates and minimal resources, aUToronto has made progress towards a functioning self-driving vehicle, in just two years. This article may prove valuable to researchers looking to develop their own self-driving platform.
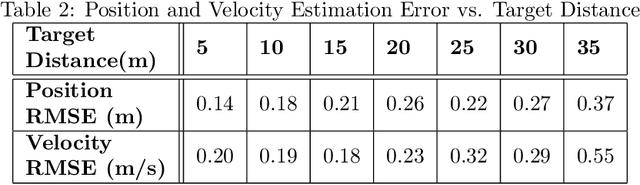
Deep Neural Networks for Improved, Impromptu Trajectory Tracking of Quadrotors
Jul 20, 2017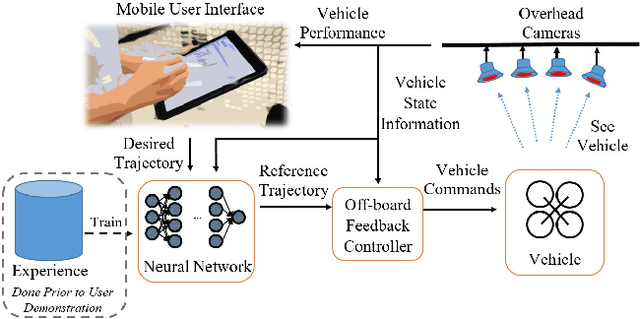
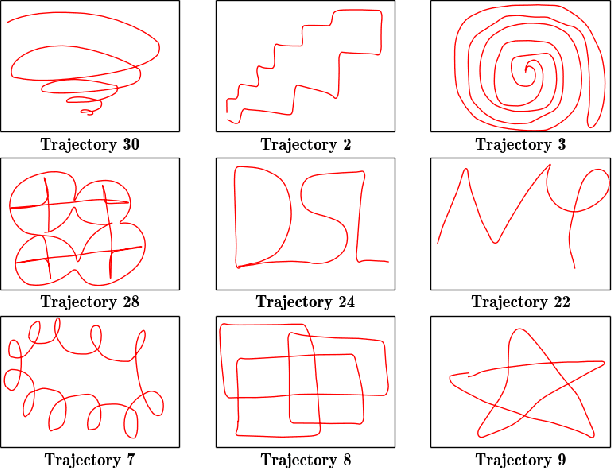

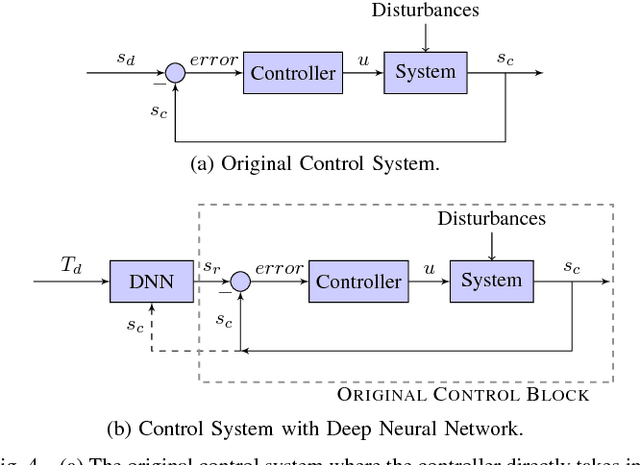
Trajectory tracking control for quadrotors is important for applications ranging from surveying and inspection, to film making. However, designing and tuning classical controllers, such as proportional-integral-derivative (PID) controllers, to achieve high tracking precision can be time-consuming and difficult, due to hidden dynamics and other non-idealities. The Deep Neural Network (DNN), with its superior capability of approximating abstract, nonlinear functions, proposes a novel approach for enhancing trajectory tracking control. This paper presents a DNN-based algorithm as an add-on module that improves the tracking performance of a classical feedback controller. Given a desired trajectory, the DNNs provide a tailored reference input to the controller based on their gained experience. The input aims to achieve a unity map between the desired and the output trajectory. The motivation for this work is an interactive "fly-as-you-draw" application, in which a user draws a trajectory on a mobile device, and a quadrotor instantly flies that trajectory with the DNN-enhanced control system. Experimental results demonstrate that the proposed approach improves the tracking precision for user-drawn trajectories after the DNNs are trained on selected periodic trajectories, suggesting the method's potential in real-world applications. Tracking errors are reduced by around 40-50% for both training and testing trajectories from users, highlighting the DNNs' capability of generalizing knowledge.