 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV Localization Using Autoencoded Satellite Images
Feb 10, 2021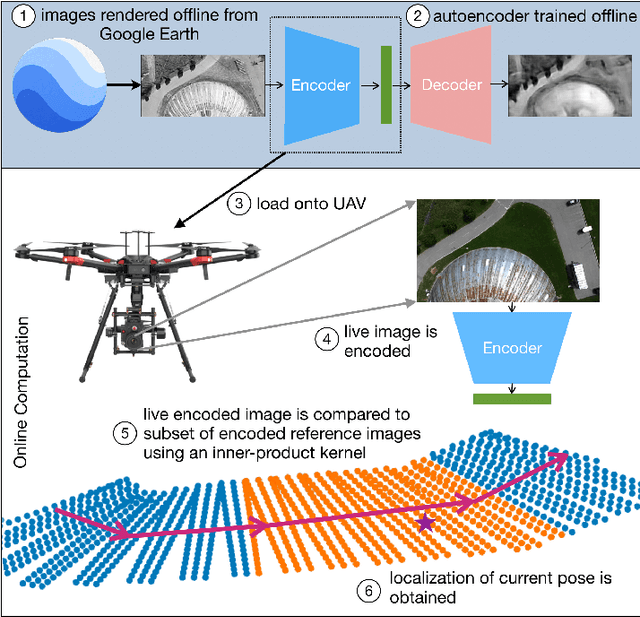
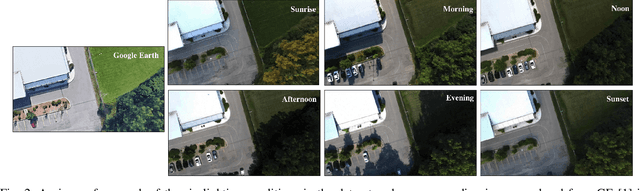
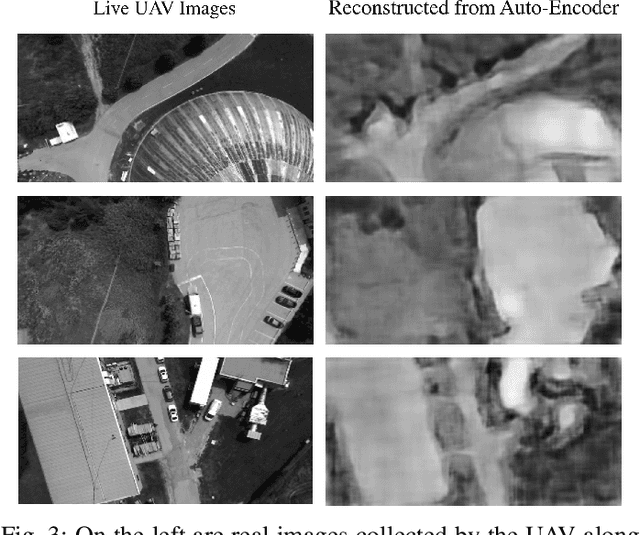
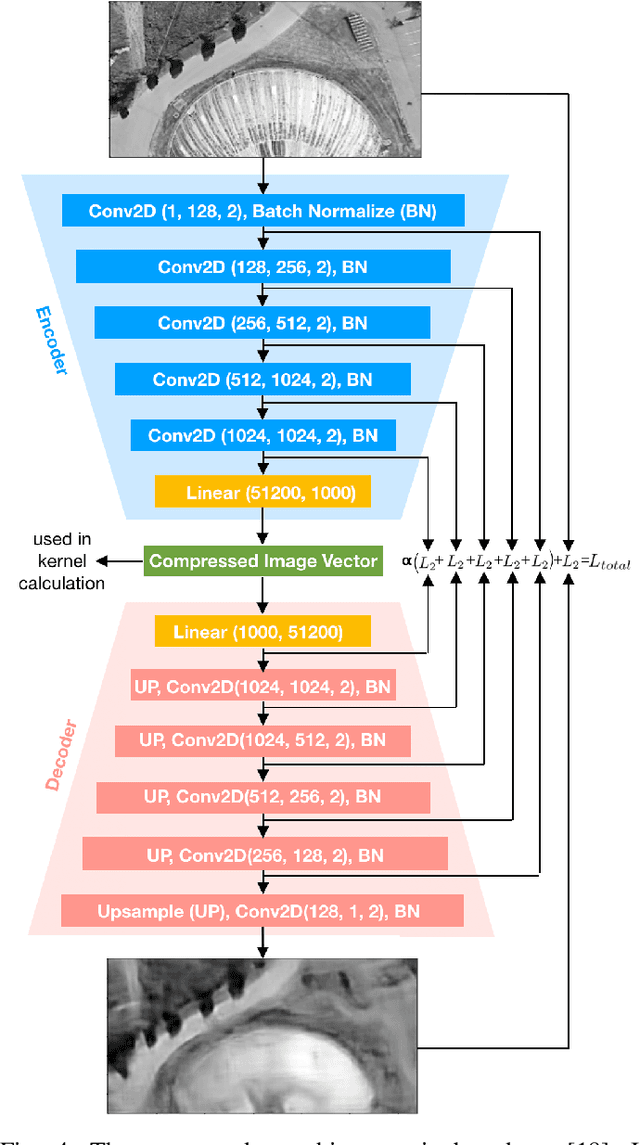
We propose and demonstrate a fast, robust method for using satellite images to localize an Unmanned Aerial Vehicle (UAV). Previous work using satellite images has large storage and computation costs and is unable to run in real time. In this work, we collect Google Earth (GE) images for a desired flight path offline and an autoencoder is trained to compress these images to a low-dimensional vector representation while retaining the key features. This trained autoencoder is used to compress a real UAV image, which is then compared to the precollected, nearby, autoencoded GE images using an inner-product kernel. This results in a distribution of weights over the corresponding GE image poses and is used to generate a single localization and associated covariance to represent uncertainty. Our localization is computed in 1% of the time of the current standard and is able to achieve a comparable RMSE of less than 3m in our experiments, where we robustly matched UAV images from six runs spanning the lighting conditions of a single day to the same map of satellite images.
Zeus: A System Description of the Two-Time Winner of the Collegiate SAE AutoDrive Competition
Apr 19, 2020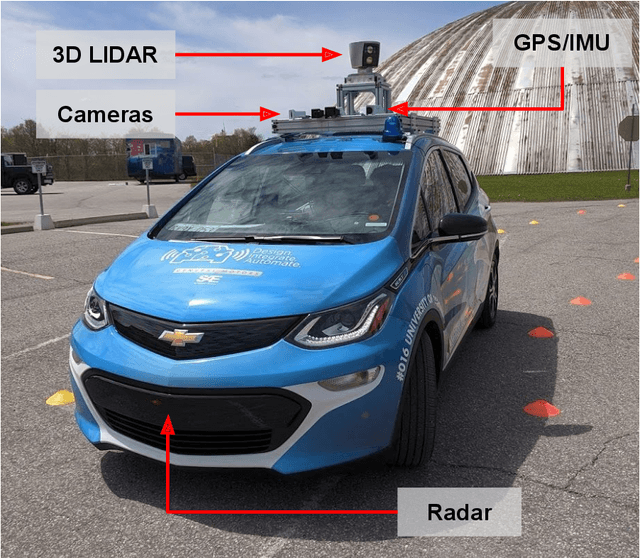
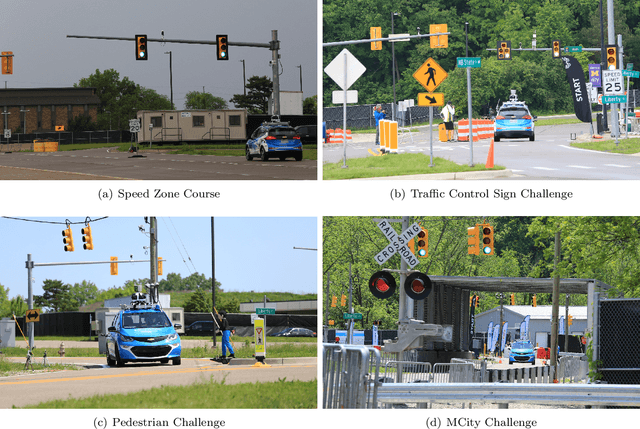
The SAE AutoDrive Challenge is a three-year collegiate competition to develop a self-driving car by 2020. The second year of the competition was held in June 2019 at MCity, a mock town built for self-driving car testing at the University of Michigan. Teams were required to autonomously navigate a series of intersections while handling pedestrians, traffic lights, and traffic signs. Zeus is aUToronto's winning entry in the AutoDrive Challenge. This article describes the system design and development of Zeus as well as many of the lessons learned along the way. This includes details on the team's organizational structure, sensor suite, software components, and performance at the Year 2 competition. With a team of mostly undergraduates and minimal resources, aUToronto has made progress towards a functioning self-driving vehicle, in just two years. This article may prove valuable to researchers looking to develop their own self-driving platform.