 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZeus: A System Description of the Two-Time Winner of the Collegiate SAE AutoDrive Competition
Apr 19, 2020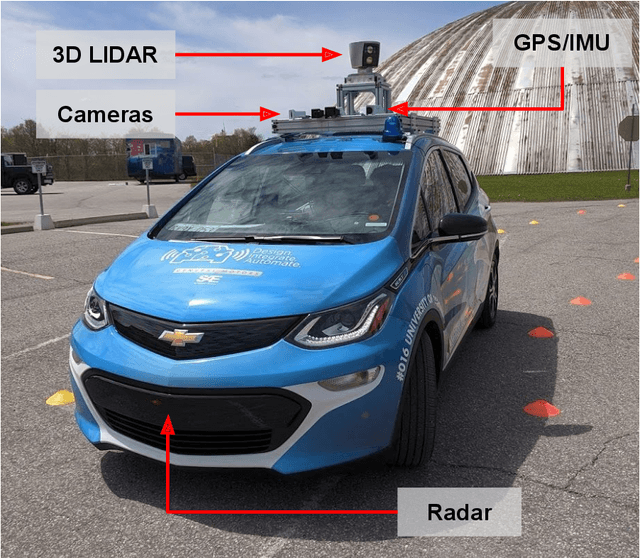
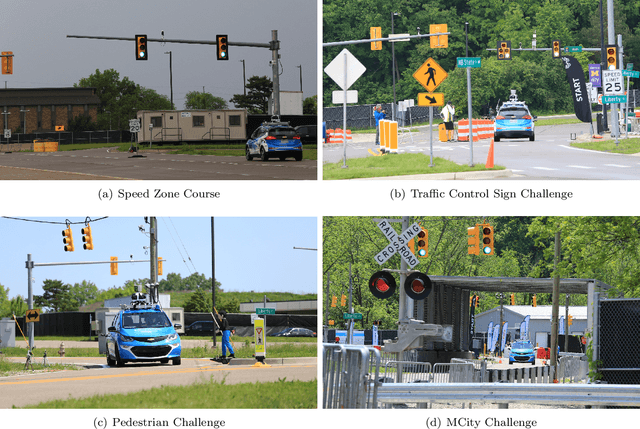
The SAE AutoDrive Challenge is a three-year collegiate competition to develop a self-driving car by 2020. The second year of the competition was held in June 2019 at MCity, a mock town built for self-driving car testing at the University of Michigan. Teams were required to autonomously navigate a series of intersections while handling pedestrians, traffic lights, and traffic signs. Zeus is aUToronto's winning entry in the AutoDrive Challenge. This article describes the system design and development of Zeus as well as many of the lessons learned along the way. This includes details on the team's organizational structure, sensor suite, software components, and performance at the Year 2 competition. With a team of mostly undergraduates and minimal resources, aUToronto has made progress towards a functioning self-driving vehicle, in just two years. This article may prove valuable to researchers looking to develop their own self-driving platform.
Image Co-localization by Mimicking a Good Detector's Confidence Score Distribution
Jul 23, 2016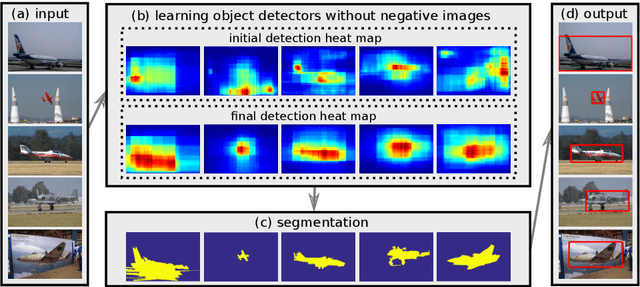

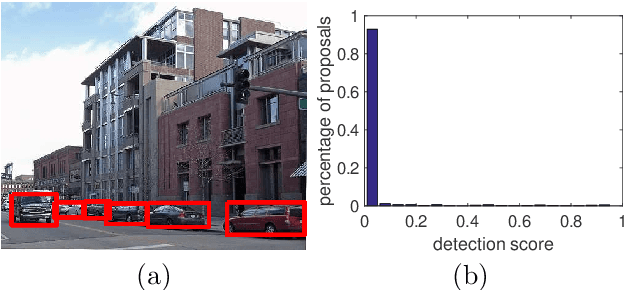
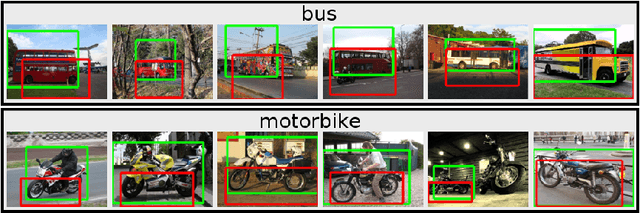
Given a set of images containing objects from the same category, the task of image co-localization is to identify and localize each instance. This paper shows that this problem can be solved by a simple but intriguing idea, that is, a common object detector can be learnt by making its detection confidence scores distributed like those of a strongly supervised detector. More specifically, we observe that given a set of object proposals extracted from an image that contains the object of interest, an accurate strongly supervised object detector should give high scores to only a small minority of proposals, and low scores to most of them. Thus, we devise an entropy-based objective function to enforce the above property when learning the common object detector. Once the detector is learnt, we resort to a segmentation approach to refine the localization. We show that despite its simplicity, our approach outperforms state-of-the-art methods.