 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge Transfer Between Robots with Similar Dynamics for High-Accuracy Impromptu Trajectory Tracking
Mar 30, 2019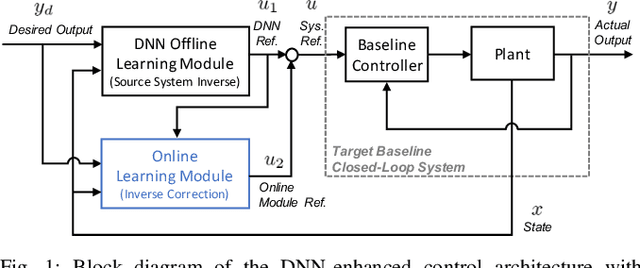
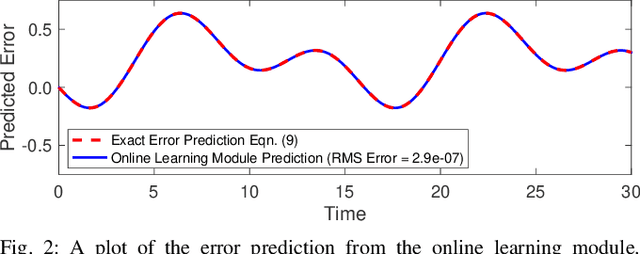

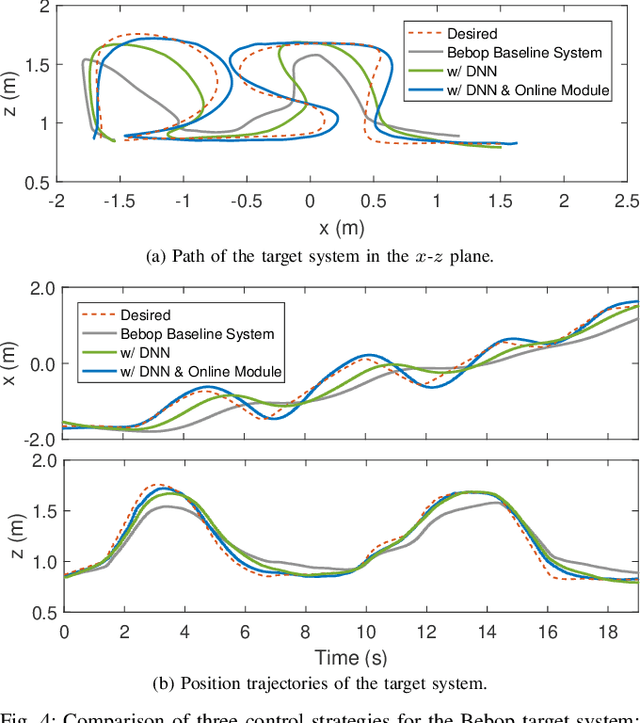
In this paper, we propose an online learning approach that enables the inverse dynamics model learned for a source robot to be transferred to a target robot (e.g., from one quadrotor to another quadrotor with different mass or aerodynamic properties). The goal is to leverage knowledge from the source robot such that the target robot achieves high-accuracy trajectory tracking on arbitrary trajectories from the first attempt with minimal data recollection and training. Most existing approaches for multi-robot knowledge transfer are based on post-analysis of datasets collected from both robots. In this work, we study the feasibility of impromptu transfer of models across robots by learning an error prediction module online. In particular, we analytically derive the form of the mapping to be learned by the online module for exact tracking, propose an approach for characterizing similarity between robots, and use these results to analyze the stability of the overall system. The proposed approach is illustrated in simulation and verified experimentally on two different quadrotors performing impromptu trajectory tracking tasks, where the quadrotors are required to accurately track arbitrary hand-drawn trajectories from the first attempt.
Estimation-Based Model Predictive Control for Automatic Crosswind Stabilization of Hybrid Aerial Vehicles
Sep 28, 2018



In this paper, we study the control design of an automatic crosswind stabilization system for a novel, buoyantly-assisted aerial transportation vehicle. This vehicle has several advantages over other aircraft including the ability to take-off and land in very short distances and without the need for roads or runways. Despite these advantages, the large surface area of the vehicle's wing makes it more susceptible to wind, which introduces undesirable roll angle motions. The role of the automatic crosswind stabilization system is to detect the roll angle deviation, and then use motors at the wingtips to counteract the wind effect. However, due to the relatively large inertia of the wing compared to small-size unmanned aerial vehicles and additional input time delays, an automatic crosswind stabilization system based on traditional control algorithms such as the proportional-integral-derivative (PID) controller results in a response time that is too slow. Another challenge is the lack of high-accuracy wind sensors that can be mounted on the vehicle's wing. Therefore, we first design a wind torque estimator that relies on inertial measurements, and then use feed-forward compensation to directly correct for the wind torque, resulting in a significantly faster response. We second combine the proposed estimator with a model predictive controller (MPC), and compare constrained MPC with unconstrained MPC for the considered application. Experimental results show that our proposed estimation-based MPC strategy reduces the response time of the system by around 80-90% compared to a standard PID controller, without the need for adding wind sensors or changing the hardware of the stabilization system.
Provably Robust Learning-Based Approach for High-Accuracy Tracking Control of Lagrangian Systems
Sep 12, 2018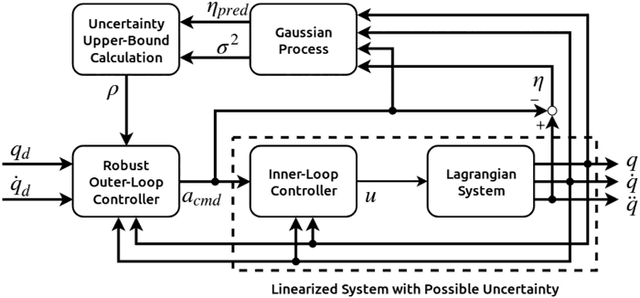
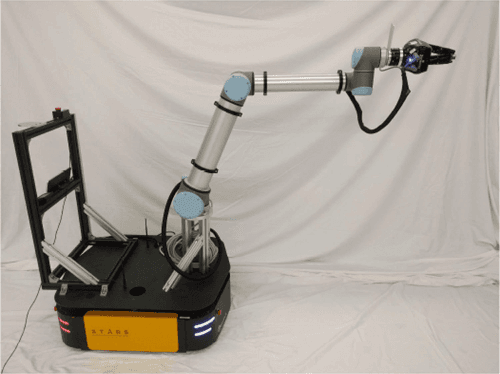
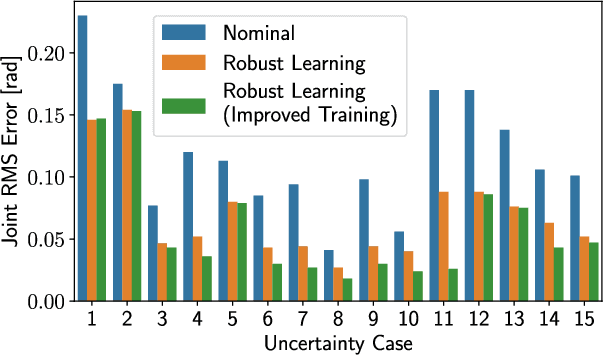
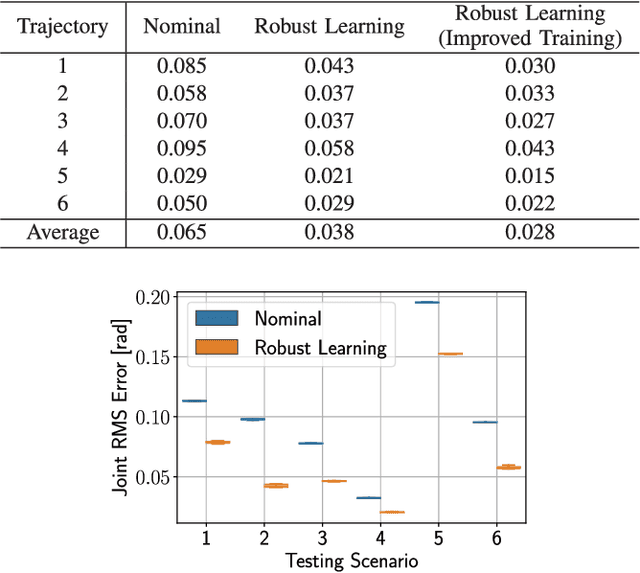
Lagrangian systems represent a wide range of robotic systems, including manipulators, wheeled and legged robots, and quadrotors. Inverse dynamics control and feedforward linearization techniques are typically used to convert the complex nonlinear dynamics of Lagrangian systems to a set of decoupled double integrators, and then a standard, outer-loop controller can be used to calculate the commanded acceleration for the linearized system. However, these methods typically depend on having a very accurate system model, which is often not available in practice. While this challenge has been addressed in the literature using different learning approaches, most of these approaches do not provide safety guarantees in terms of stability of the learning-based control system. In this paper, we provide a novel, learning-based control approach based on Gaussian processes (GPs) that ensures both stability of the closed-loop system and high-accuracy tracking. We use GPs to approximate the error between the commanded acceleration and the actual acceleration of the system, and then use the predicted mean and variance of the GP to calculate an upper bound on the uncertainty of the linearized model. This uncertainty bound is then used in a robust, outer-loop controller to ensure stability of the overall system. Moreover, we show that the tracking error converges to a ball with a radius that can be made arbitrarily small. Furthermore, we verify the effectiveness of our approach via simulations on a 2 degree-of-freedom (DOF) planar manipulator and experimentally on a 6 DOF industrial manipulator.
Data-Efficient Multirobot, Multitask Transfer Learning for Trajectory Tracking
Apr 02, 2018



Transfer learning has the potential to reduce the burden of data collection and to decrease the unavoidable risks of the training phase. In this letter, we introduce a multirobot, multitask transfer learning framework that allows a system to complete a task by learning from a few demonstrations of another task executed on another system. We focus on the trajectory tracking problem where each trajectory represents a different task, since many robotic tasks can be described as a trajectory tracking problem. The proposed multirobot transfer learning framework is based on a combined $\mathcal{L}_1$ adaptive control and an iterative learning control approach. The key idea is that the adaptive controller forces dynamically different systems to behave as a specified reference model. The proposed multitask transfer learning framework uses theoretical control results (e.g., the concept of vector relative degree) to learn a map from desired trajectories to the inputs that make the system track these trajectories with high accuracy. This map is used to calculate the inputs for a new, unseen trajectory. Experimental results using two different quadrotor platforms and six different trajectories show that, on average, the proposed framework reduces the first-iteration tracking error by 74% when information from tracking a different single trajectory on a different quadrotor is utilized.
* 9 pages, 6 figures, submitted to RA-L 2017
An Inversion-Based Learning Approach for Improving Impromptu Trajectory Tracking of Robots with Non-Minimum Phase Dynamics
Mar 07, 2018



This paper presents a learning-based approach for impromptu trajectory tracking for non-minimum phase systems, i.e., systems with unstable inverse dynamics. Inversion-based feedforward approaches are commonly used for improving tracking performance; however, these approaches are not directly applicable to non-minimum phase systems due to their inherent instability. In order to resolve the instability issue, existing methods have assumed that the system model is known and used pre-actuation or inverse approximation techniques. In this work, we propose an approach for learning a stable, approximate inverse of a non-minimum phase baseline system directly from its input-output data. Through theoretical discussions, simulations, and experiments on two different platforms, we show the stability of our proposed approach and its effectiveness for high-accuracy, impromptu tracking. Our approach also shows that including more information in the training, as is commonly assumed to be useful, does not lead to better performance but may trigger instability and impact the effectiveness of the overall approach.
Design of Deep Neural Networks as Add-on Blocks for Improving Impromptu Trajectory Tracking
Oct 06, 2017



This paper introduces deep neural networks (DNNs) as add-on blocks to baseline feedback control systems to enhance tracking performance of arbitrary desired trajectories. The DNNs are trained to adapt the reference signals to the feedback control loop. The goal is to achieve a unity map between the desired and the actual outputs. In previous work, the efficacy of this approach was demonstrated on quadrotors; on 30 unseen test trajectories, the proposed DNN approach achieved an average impromptu tracking error reduction of 43% as compared to the baseline feedback controller. Motivated by these results, this work aims to provide platform-independent design guidelines for the proposed DNN-enhanced control architecture. In particular, we provide specific guidelines for the DNN feature selection, derive conditions for when the proposed approach is effective, and show in which cases the training efficiency can be further increased.
Multi-Robot Transfer Learning: A Dynamical System Perspective
Jul 27, 2017



Multi-robot transfer learning allows a robot to use data generated by a second, similar robot to improve its own behavior. The potential advantages are reducing the time of training and the unavoidable risks that exist during the training phase. Transfer learning algorithms aim to find an optimal transfer map between different robots. In this paper, we investigate, through a theoretical study of single-input single-output (SISO) systems, the properties of such optimal transfer maps. We first show that the optimal transfer learning map is, in general, a dynamic system. The main contribution of the paper is to provide an algorithm for determining the properties of this optimal dynamic map including its order and regressors (i.e., the variables it depends on). The proposed algorithm does not require detailed knowledge of the robots' dynamics, but relies on basic system properties easily obtainable through simple experimental tests. We validate the proposed algorithm experimentally through an example of transfer learning between two different quadrotor platforms. Experimental results show that an optimal dynamic map, with correct properties obtained from our proposed algorithm, achieves 60-70% reduction of transfer learning error compared to the cases when the data is directly transferred or transferred using an optimal static map.
Deep Neural Networks for Improved, Impromptu Trajectory Tracking of Quadrotors
Jul 20, 2017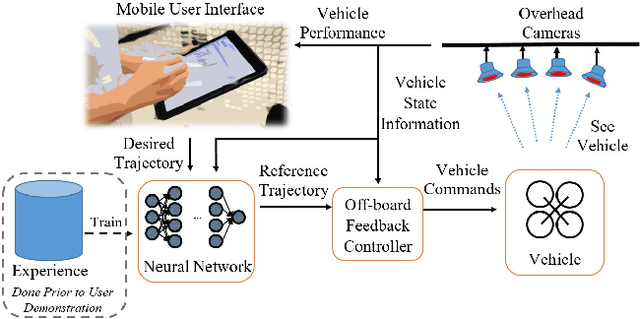
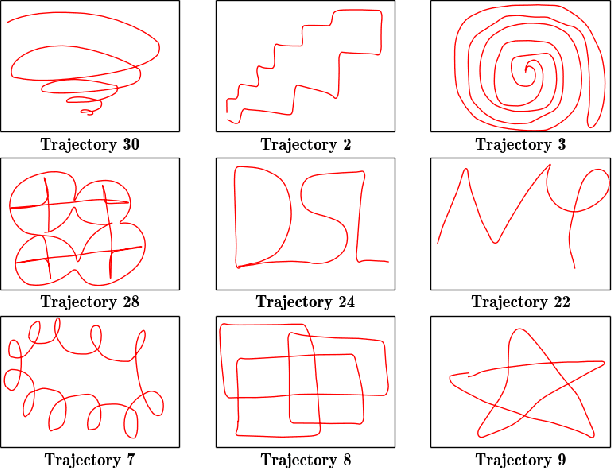

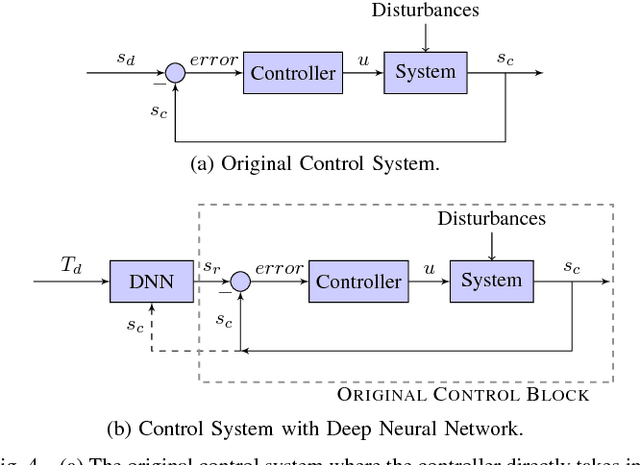
Trajectory tracking control for quadrotors is important for applications ranging from surveying and inspection, to film making. However, designing and tuning classical controllers, such as proportional-integral-derivative (PID) controllers, to achieve high tracking precision can be time-consuming and difficult, due to hidden dynamics and other non-idealities. The Deep Neural Network (DNN), with its superior capability of approximating abstract, nonlinear functions, proposes a novel approach for enhancing trajectory tracking control. This paper presents a DNN-based algorithm as an add-on module that improves the tracking performance of a classical feedback controller. Given a desired trajectory, the DNNs provide a tailored reference input to the controller based on their gained experience. The input aims to achieve a unity map between the desired and the output trajectory. The motivation for this work is an interactive "fly-as-you-draw" application, in which a user draws a trajectory on a mobile device, and a quadrotor instantly flies that trajectory with the DNN-enhanced control system. Experimental results demonstrate that the proposed approach improves the tracking precision for user-drawn trajectories after the DNNs are trained on selected periodic trajectories, suggesting the method's potential in real-world applications. Tracking errors are reduced by around 40-50% for both training and testing trajectories from users, highlighting the DNNs' capability of generalizing knowledge.
On the Construction of Safe Controllable Regions for Affine Systems with Applications to Robotics
Oct 05, 2016



This paper studies the problem of constructing in-block controllable (IBC) regions for affine systems. That is, we are concerned with constructing regions in the state space of affine systems such that all the states in the interior of the region are mutually accessible through the region's interior by applying uniformly bounded inputs. We first show that existing results for checking in-block controllability on given polytopic regions cannot be easily extended to address the question of constructing IBC regions. We then explore the geometry of the problem to provide a computationally efficient algorithm for constructing IBC regions. We also prove the soundness of the algorithm. We then use the proposed algorithm to construct safe speed profiles for different robotic systems, including fully-actuated robots, ground robots modeled as unicycles with acceleration limits, and unmanned aerial vehicles (UAVs). Finally, we present several experimental results on UAVs to verify the effectiveness of the proposed algorithm. For instance, we use the proposed algorithm for real-time collision avoidance for UAVs.