 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge Transfer Between Robots with Similar Dynamics for High-Accuracy Impromptu Trajectory Tracking
Paper and Code
Mar 30, 2019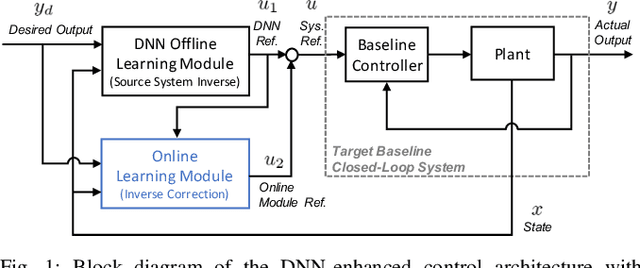
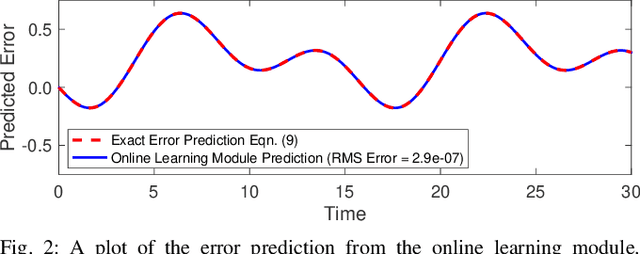

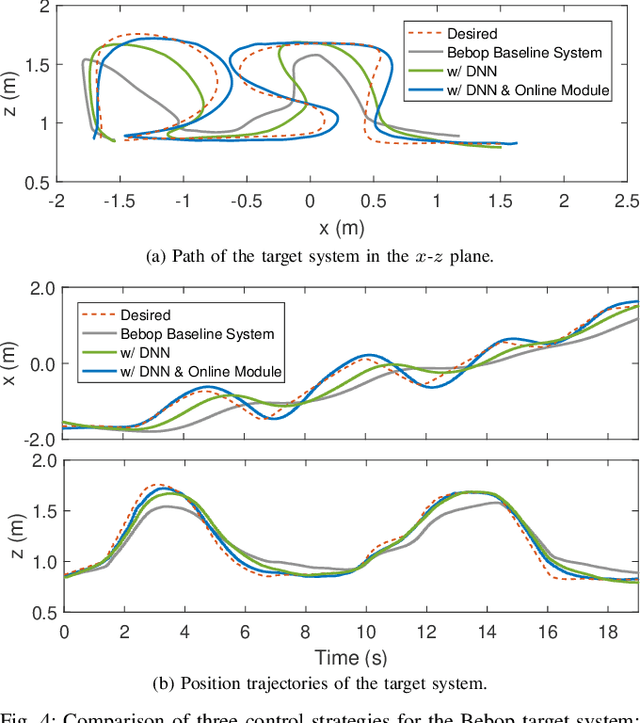
In this paper, we propose an online learning approach that enables the inverse dynamics model learned for a source robot to be transferred to a target robot (e.g., from one quadrotor to another quadrotor with different mass or aerodynamic properties). The goal is to leverage knowledge from the source robot such that the target robot achieves high-accuracy trajectory tracking on arbitrary trajectories from the first attempt with minimal data recollection and training. Most existing approaches for multi-robot knowledge transfer are based on post-analysis of datasets collected from both robots. In this work, we study the feasibility of impromptu transfer of models across robots by learning an error prediction module online. In particular, we analytically derive the form of the mapping to be learned by the online module for exact tracking, propose an approach for characterizing similarity between robots, and use these results to analyze the stability of the overall system. The proposed approach is illustrated in simulation and verified experimentally on two different quadrotors performing impromptu trajectory tracking tasks, where the quadrotors are required to accurately track arbitrary hand-drawn trajectories from the first attempt.