 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeaVis: Modeling and Control of a Remotely Operated Towed Vehicle for Seabed Visualization and Mapping
May 14, 2026High-resolution seafloor mapping necessitates stable and precise positioning for underwater robots. This paper introduces a novel mathematical model for SeaVis remotely operated towed vehicles (ROTVs) and develops a gain-scheduled linear-quadratic regulator (LQR) for robust depth and attitude control. We validate the approach in a high-fidelity simulation, benchmarking the LQR against a conventional PID controller over a challenging seabed profile. The presented results demonstrate the LQR's superior performance, with significantly enhanced robustness to disturbances, greater control efficiency, and substantially reduced flap actuation. The gain scheduling also confirms the controller's effectiveness across the full operational velocity range. The complete simulation environment and controller are open-sourced.
Thermal Image Refinement with Depth Estimation using Recurrent Networks for Monocular ORB-SLAM3
Mar 16, 2026Autonomous navigation in GPS-denied and visually degraded environments remains challenging for unmanned aerial vehicles (UAVs). To this end, we investigate the use of a monocular thermal camera as a standalone sensor on a UAV platform for real-time depth estimation and simultaneous localization and mapping (SLAM). To extract depth information from thermal images, we propose a novel pipeline employing a lightweight supervised network with recurrent blocks (RBs) integrated to capture temporal dependencies, enabling more robust predictions. The network combines lightweight convolutional backbones with a thermal refinement network (T-RefNet) to refine raw thermal inputs and enhance feature visibility. The refined thermal images and predicted depth maps are integrated into ORB-SLAM3, enabling thermal-only localization. Unlike previous methods, the network is trained on a custom non-radiometric dataset, obviating the need for high-cost radiometric thermal cameras. Experimental results on datasets and UAV flights demonstrate competitive depth accuracy and robust SLAM performance under low-light conditions. On the radiometric VIVID++ (indoor-dark) dataset, our method achieves an absolute relative error of approximately 0.06, compared to baselines exceeding 0.11. In our non-radiometric indoor set, baseline errors remain above 0.24, whereas our approach remains below 0.10. Thermal-only ORB-SLAM3 maintains a mean trajectory error under 0.4 m.
Edged USLAM: Edge-Aware Event-Based SLAM with Learning-Based Depth Priors
Mar 09, 2026Conventional visual simultaneous localization and mapping (SLAM) algorithms often fail under rapid motion, low illumination, or abrupt lighting transitions due to motion blur and limited dynamic range. Event cameras mitigate these issues with high temporal resolution and high dynamic range (HDR), but their sparse, asynchronous outputs complicate feature extraction and integration with other sensors; e.g. inertial measurement units (IMUs) and standard cameras. We present Edged USLAM, a hybrid visual-inertial system that extends Ultimate SLAM (USLAM) with an edge-aware front-end and a lightweight depth module. The frontend enhances event frames for robust feature tracking and nonlinear motion compensation, while the depth module provides coarse, region-of-interest (ROI)-based scene depth to improve motion compensation and scale consistency. Evaluations across public benchmarks and real-world unmanned air vehicle (UAV) flights demonstrate that performance varies significantly by scenario. For instance, event-only methods like point-line event-based visual-inertial odometry (PL-EVIO) or learning-based pipelines such as deep event-based visual odometry (DEVO) excel in highly aggressive or extreme HDR conditions. In contrast, Edged USLAM provides superior stability and minimal drift in slow or structured trajectories, ensuring consistently accurate localization on real flights under challenging illumination. These findings highlight the complementary strengths of event-only, learning-based, and hybrid approaches, while positioning Edged USLAM as a robust solution for diverse aerial navigation tasks.
GIANT - Global Path Integration and Attentive Graph Networks for Multi-Agent Trajectory Planning
Mar 04, 2026This paper presents a novel approach to multi-robot collision avoidance that integrates global path planning with local navigation strategies, utilizing attentive graph neural networks to manage dynamic interactions among agents. We introduce a local navigation model that leverages pre-planned global paths, allowing robots to adhere to optimal routes while dynamically adjusting to environmental changes. The models robustness is enhanced through the introduction of noise during training, resulting in superior performance in complex, dynamic environments. Our approach is evaluated against established baselines, including NH-ORCA, DRL-NAV, and GA3C-CADRL, across various structurally diverse simulated scenarios. The results demonstrate that our model achieves consistently higher success rates, lower collision rates, and more efficient navigation, particularly in challenging scenarios where baseline models struggle. This work offers an advancement in multi-robot navigation, with implications for robust performance in complex, dynamic environments with varying degrees of complexity, such as those encountered in logistics, where adaptability is essential for accommodating unforeseen obstacles and unpredictable changes.
Monocular visual simultaneous localization and mapping: (r)evolution from geometry to deep learning-based pipelines
Mar 04, 2025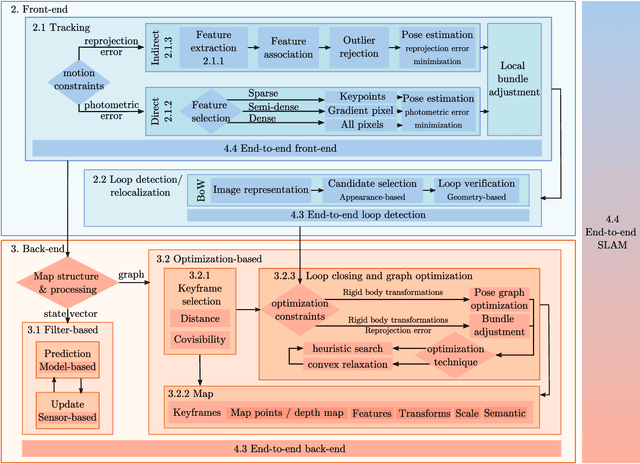
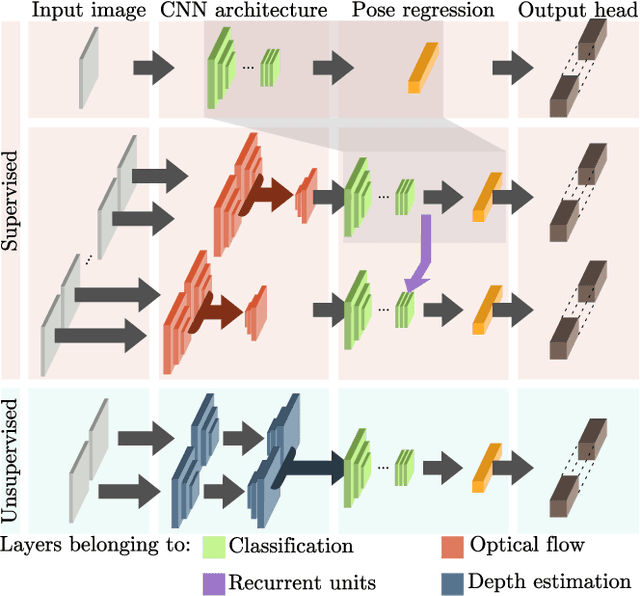
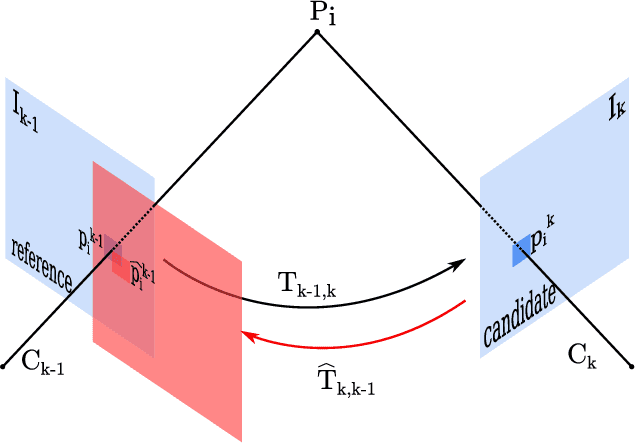
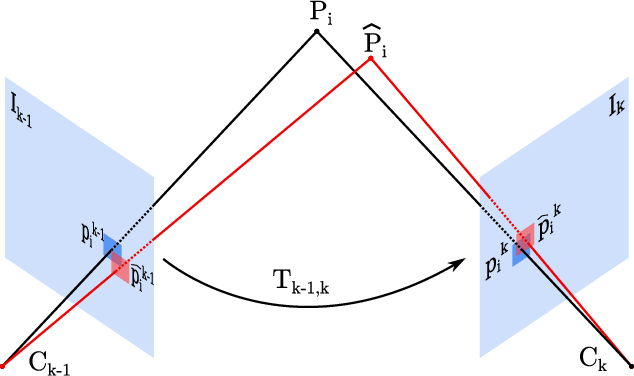
With the rise of deep learning, there is a fundamental change in visual SLAM algorithms toward developing different modules trained as end-to-end pipelines. However, regardless of the implementation domain, visual SLAM's performance is subject to diverse environmental challenges, such as dynamic elements in outdoor environments, harsh imaging conditions in underwater environments, or blurriness in high-speed setups. These environmental challenges need to be identified to study the real-world viability of SLAM implementations. Motivated by the aforementioned challenges, this paper surveys the current state of visual SLAM algorithms according to the two main frameworks: geometry-based and learning-based SLAM. First, we introduce a general formulation of the SLAM pipeline that includes most of the implementations in the literature. Second, those implementations are classified and surveyed for geometry and learning-based SLAM. After that, environment-specific challenges are formulated to enable experimental evaluation of the resilience of different visual SLAM classes to varying imaging conditions. We address two significant issues in surveying visual SLAM, providing (1) a consistent classification of visual SLAM pipelines and (2) a robust evaluation of their performance under different deployment conditions. Finally, we give our take on future opportunities for visual SLAM implementations.
Continual Learning for Robust Gate Detection under Dynamic Lighting in Autonomous Drone Racing
May 02, 2024



In autonomous and mobile robotics, a principal challenge is resilient real-time environmental perception, particularly in situations characterized by unknown and dynamic elements, as exemplified in the context of autonomous drone racing. This study introduces a perception technique for detecting drone racing gates under illumination variations, which is common during high-speed drone flights. The proposed technique relies upon a lightweight neural network backbone augmented with capabilities for continual learning. The envisaged approach amalgamates predictions of the gates' positional coordinates, distance, and orientation, encapsulating them into a cohesive pose tuple. A comprehensive number of tests serve to underscore the efficacy of this approach in confronting diverse and challenging scenarios, specifically those involving variable lighting conditions. The proposed methodology exhibits notable robustness in the face of illumination variations, thereby substantiating its effectiveness.
Visual Tracking Nonlinear Model Predictive Control Method for Autonomous Wind Turbine Inspection
Oct 21, 2023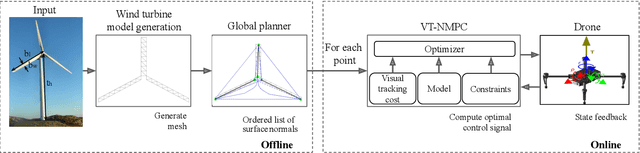
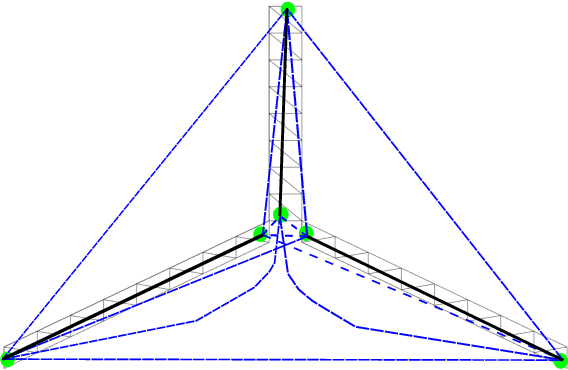
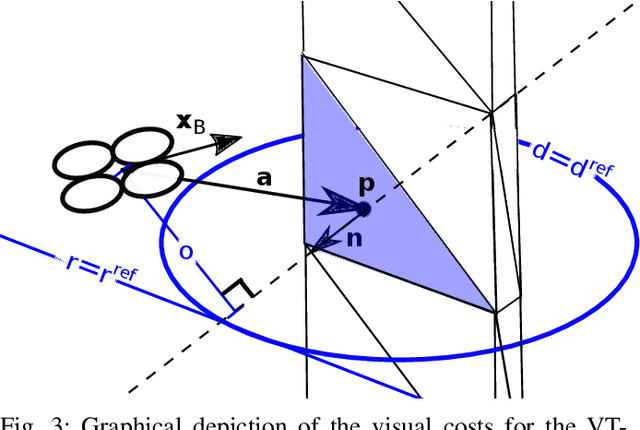
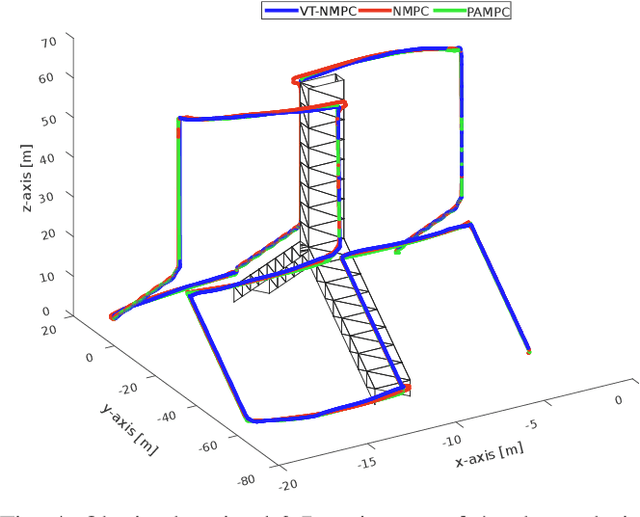
Automated visual inspection of on-and offshore wind turbines using aerial robots provides several benefits, namely, a safe working environment by circumventing the need for workers to be suspended high above the ground, reduced inspection time, preventive maintenance, and access to hard-to-reach areas. A novel nonlinear model predictive control (NMPC) framework alongside a global wind turbine path planner is proposed to achieve distance-optimal coverage for wind turbine inspection. Unlike traditional MPC formulations, visual tracking NMPC (VT-NMPC) is designed to track an inspection surface, instead of a position and heading trajectory, thereby circumventing the need to provide an accurate predefined trajectory for the drone. An additional capability of the proposed VT-NMPC method is that by incorporating inspection requirements as visual tracking costs to minimize, it naturally achieves the inspection task successfully while respecting the physical constraints of the drone. Multiple simulation runs and real-world tests demonstrate the efficiency and efficacy of the proposed automated inspection framework, which outperforms the traditional MPC designs, by providing full coverage of the target wind turbine blades as well as its robustness to changing wind conditions. The implementation codes are open-sourced.
UNav-Sim: A Visually Realistic Underwater Robotics Simulator and Synthetic Data-generation Framework
Oct 18, 2023



Underwater robotic surveys can be costly due to the complex working environment and the need for various sensor modalities. While underwater simulators are essential, many existing simulators lack sufficient rendering quality, restricting their ability to transfer algorithms from simulation to real-world applications. To address this limitation, we introduce UNav-Sim, which, to the best of our knowledge, is the first simulator to incorporate the efficient, high-detail rendering of Unreal Engine 5 (UE5). UNav-Sim is open-source and includes an autonomous vision-based navigation stack. By supporting standard robotics tools like ROS, UNav-Sim enables researchers to develop and test algorithms for underwater environments efficiently.
PencilNet: Zero-Shot Sim-to-Real Transfer Learning for Robust Gate Perception in Autonomous Drone Racing
Jul 28, 2022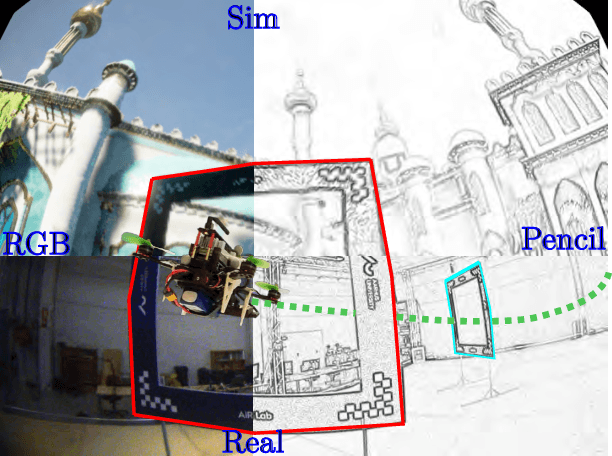


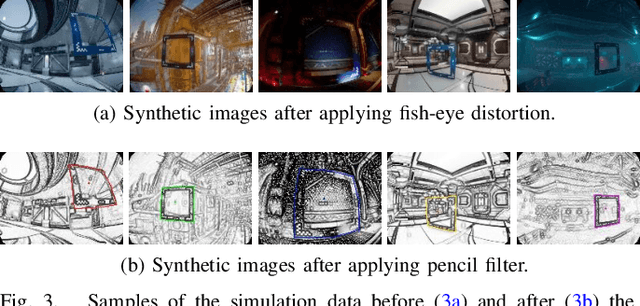
In autonomous and mobile robotics, one of the main challenges is the robust on-the-fly perception of the environment, which is often unknown and dynamic, like in autonomous drone racing. In this work, we propose a novel deep neural network-based perception method for racing gate detection -- PencilNet -- which relies on a lightweight neural network backbone on top of a pencil filter. This approach unifies predictions of the gates' 2D position, distance, and orientation in a single pose tuple. We show that our method is effective for zero-shot sim-to-real transfer learning that does not need any real-world training samples. Moreover, our framework is highly robust to illumination changes commonly seen under rapid flight compared to state-of-art methods. A thorough set of experiments demonstrates the effectiveness of this approach in multiple challenging scenarios, where the drone completes various tracks under different lighting conditions.
Event-based Navigation for Autonomous Drone Racing with Sparse Gated Recurrent Network
Apr 05, 2022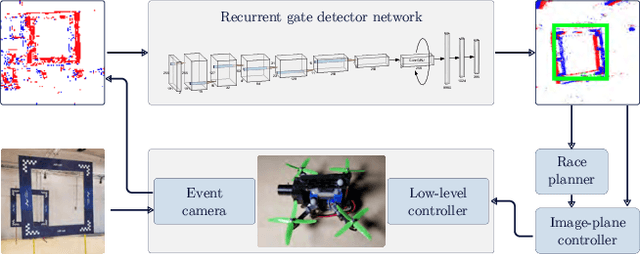

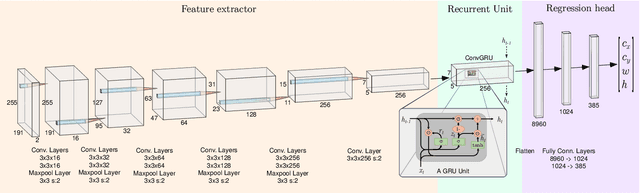
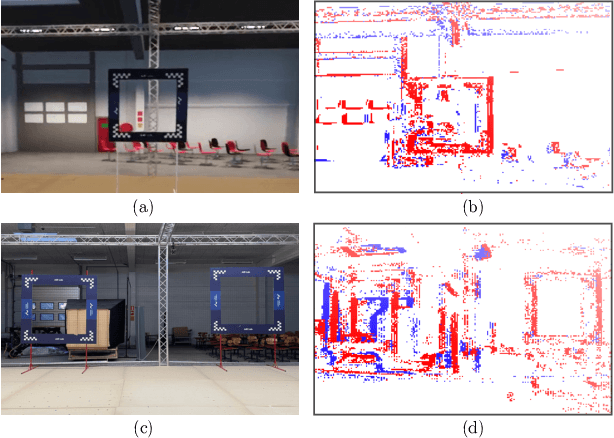
Event-based vision has already revolutionized the perception task for robots by promising faster response, lower energy consumption, and lower bandwidth without introducing motion blur. In this work, a novel deep learning method based on gated recurrent units utilizing sparse convolutions for detecting gates in a race track is proposed using event-based vision for the autonomous drone racing problem. We demonstrate the efficiency and efficacy of the perception pipeline on a real robot platform that can safely navigate a typical autonomous drone racing track in real-time. Throughout the experiments, we show that the event-based vision with the proposed gated recurrent unit and pretrained models on simulated event data significantly improve the gate detection precision. Furthermore, an event-based drone racing dataset consisting of both simulated and real data sequences is publicly released.